constraints Directory Reference
Directory dependency graph for constraints:
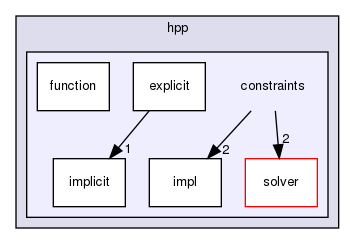
Directories | |
| directory | explicit |
| directory | function |
| directory | impl |
| directory | implicit |
| directory | solver |
|
hpp-constraints
4.9.1
Definition of basic geometric constraints for motion planning
|
Directories | |
| directory | explicit |
| directory | function |
| directory | impl |
| directory | implicit |
| directory | solver |
 1.8.13
1.8.13