manipulability.hh File Reference
#include <hpp/constraints/fwd.hh>#include <hpp/constraints/config.hh>#include <hpp/constraints/differentiable-function.hh>#include <hpp/constraints/matrix-view.hh>
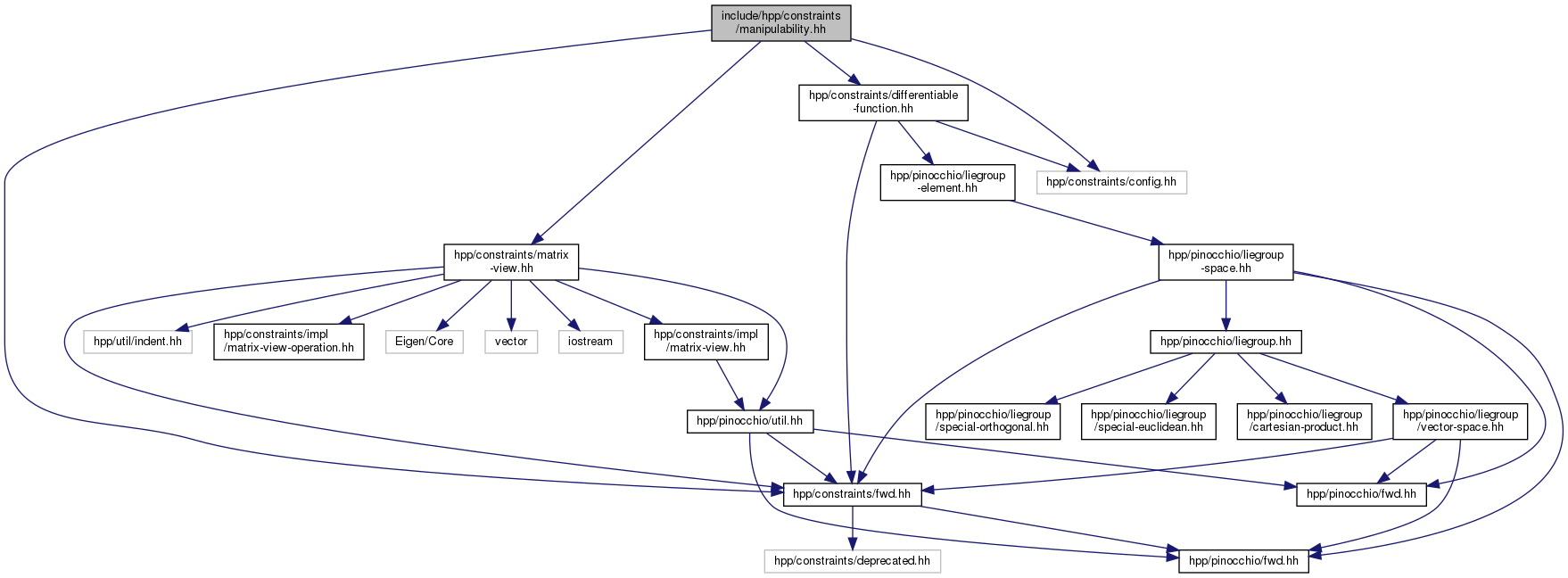
Include dependency graph for manipulability.hh:
Go to the source code of this file.
Classes | |
| class | hpp::constraints::Manipulability |
| Differentiable function. More... | |
Namespaces | |
| hpp | |
| hpp::constraints | |
Typedefs | |
| typedef boost::shared_ptr< Manipulability > | hpp::constraints::ManipulabilityPtr_t |
Functions | |
| hpp::constraints::HPP_PREDEF_CLASS (Manipulability) | |
