macros.hh File Reference
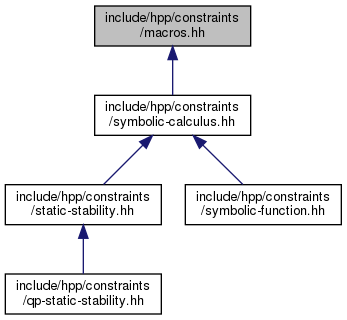
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Macros | |
| #define | HPP_DEBUG_SVDCHECK(svd) do { } while (0) |
| #define | hppDnum(channel, data) do { } while (0) |
Macro Definition Documentation
◆ HPP_DEBUG_SVDCHECK
| #define HPP_DEBUG_SVDCHECK | ( | svd | ) | do { } while (0) |
◆ hppDnum
| #define hppDnum | ( | channel, | |
| data | |||
| ) | do { } while (0) |
