Public Types |
Public Member Functions |
Static Public Member Functions |
Protected Member Functions |
List of all members
hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder > Class Template Reference
#include <hpp/core/steering-method/fwd.hh>
Inheritance diagram for hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >:
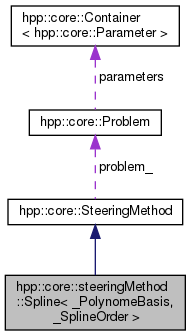
Collaboration diagram for hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >:
Public Types | |
| enum | { PolynomeBasis = _PolynomeBasis, SplineOrder = _SplineOrder } |
| typedef path::Spline< PolynomeBasis, SplineOrder > | SplinePath |
| typedef SplinePath::Ptr_t | SplinePathPtr_t |
| typedef boost::shared_ptr< Spline > | Ptr_t |
| typedef boost::weak_ptr< Spline > | WkPtr_t |
Public Member Functions | |
| virtual SteeringMethodPtr_t | copy () const |
| Copy instance and return shared pointer. More... | |
| virtual PathPtr_t | impl_compute (ConfigurationIn_t q1, ConfigurationIn_t q2) const |
| create a path between two configurations More... | |
| PathPtr_t | steer (ConfigurationIn_t q1, std::vector< int > order1, matrixIn_t derivatives1, ConfigurationIn_t q2, std::vector< int > order2, matrixIn_t derivatives2) const |
| create a path between two configurations More... | |
 Public Member Functions inherited from hpp::core::SteeringMethod Public Member Functions inherited from hpp::core::SteeringMethod | |
| PathPtr_t | operator() (ConfigurationIn_t q1, ConfigurationIn_t q2) const |
| PathPtr_t | steer (ConfigurationIn_t q1, ConfigurationIn_t q2) const |
| virtual | ~SteeringMethod () |
| const Problem & | problem () const |
| void | constraints (const ConstraintSetPtr_t &constraints) |
| Set constraint set. More... | |
| const ConstraintSetPtr_t & | constraints () const |
| Get constraint set. More... | |
Static Public Member Functions | |
| static Ptr_t | create (const Problem &problem) |
| static Ptr_t | createCopy (const Ptr_t &other) |
| Copy instance and return shared pointer. More... | |
Protected Member Functions | |
| Spline (const Problem &problem) | |
| Constructor. More... | |
| Spline (const Spline &other) | |
| Copy constructor. More... | |
| void | init (WkPtr_t weak) |
| Store weak pointer to itself. More... | |
| Protected Member Functions inherited from hpp::core::SteeringMethod | |
| SteeringMethod (const Problem &problem) | |
| Constructor. More... | |
| SteeringMethod (const SteeringMethod &other) | |
| void | init (SteeringMethodWkPtr_t weak) |
| Store weak pointer to itself. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from hpp::core::SteeringMethod | |
| const Problem & | problem_ |
Detailed Description
template<int _PolynomeBasis, int _SplineOrder>
class hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >
Steering method that creates path::Spline instances
Member Typedef Documentation
◆ Ptr_t
template<int _PolynomeBasis, int _SplineOrder>
| typedef boost::shared_ptr<Spline> hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >::Ptr_t |
◆ SplinePath
template<int _PolynomeBasis, int _SplineOrder>
| typedef path::Spline<PolynomeBasis, SplineOrder> hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >::SplinePath |
◆ SplinePathPtr_t
template<int _PolynomeBasis, int _SplineOrder>
| typedef SplinePath::Ptr_t hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >::SplinePathPtr_t |
◆ WkPtr_t
template<int _PolynomeBasis, int _SplineOrder>
| typedef boost::weak_ptr<Spline> hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >::WkPtr_t |
Member Enumeration Documentation
◆ anonymous enum
Constructor & Destructor Documentation
◆ Spline() [1/2]
template<int _PolynomeBasis, int _SplineOrder>
|
protected |
Constructor.
◆ Spline() [2/2]
template<int _PolynomeBasis, int _SplineOrder>
|
protected |
Copy constructor.
Member Function Documentation
◆ copy()
template<int _PolynomeBasis, int _SplineOrder>
|
inlinevirtual |
Copy instance and return shared pointer.
Implements hpp::core::SteeringMethod.
◆ create()
template<int _PolynomeBasis, int _SplineOrder>
|
inlinestatic |
◆ createCopy()
template<int _PolynomeBasis, int _SplineOrder>
|
inlinestatic |
Copy instance and return shared pointer.
◆ impl_compute()
template<int _PolynomeBasis, int _SplineOrder>
|
virtual |
create a path between two configurations
Implements hpp::core::SteeringMethod.
◆ init()
template<int _PolynomeBasis, int _SplineOrder>
|
inlineprotected |
Store weak pointer to itself.
◆ steer()
template<int _PolynomeBasis, int _SplineOrder>
| PathPtr_t hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >::steer | ( | ConfigurationIn_t | q1, |
| std::vector< int > | order1, | ||
| matrixIn_t | derivatives1, | ||
| ConfigurationIn_t | q2, | ||
| std::vector< int > | order2, | ||
| matrixIn_t | derivatives2 | ||
| ) | const |
create a path between two configurations
The documentation for this class was generated from the following files:
