discretized-joint-bound.hh File Reference
#include <hpp/core/path-validation/discretized.hh>
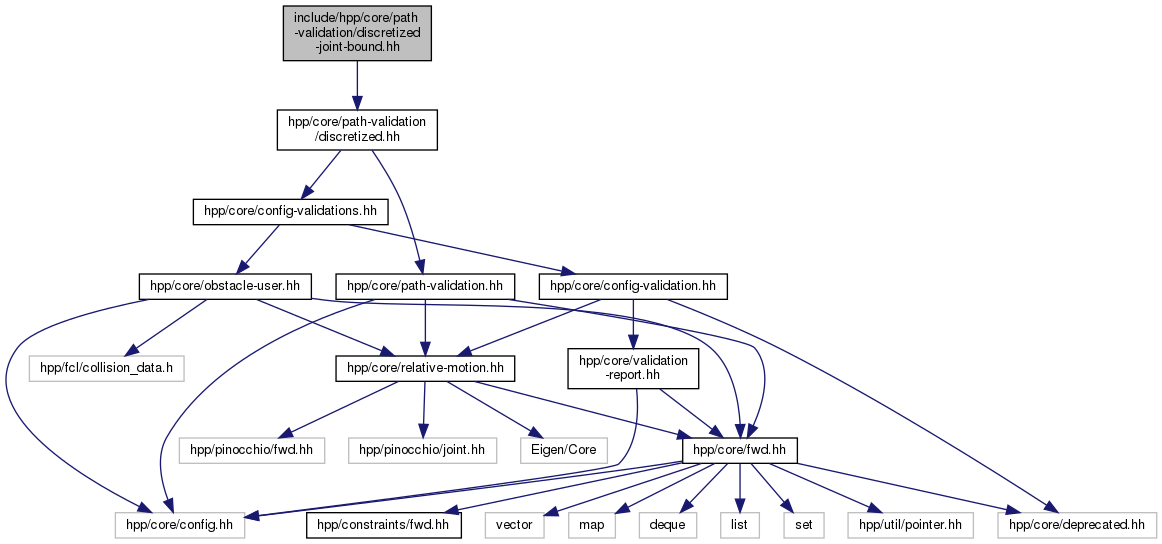
Include dependency graph for discretized-joint-bound.hh:
Go to the source code of this file.
Namespaces | |
| hpp | |
| hpp::core | |
| hpp::core::pathValidation | |
Functions | |
| DiscretizedPtr_t | hpp::core::pathValidation::createDiscretizedJointBound (const DevicePtr_t &robot, const value_type &stepSize) |
| Validation of path by checking joint bounds at discretized parameter values. More... | |
