roadmap-factory.hh File Reference
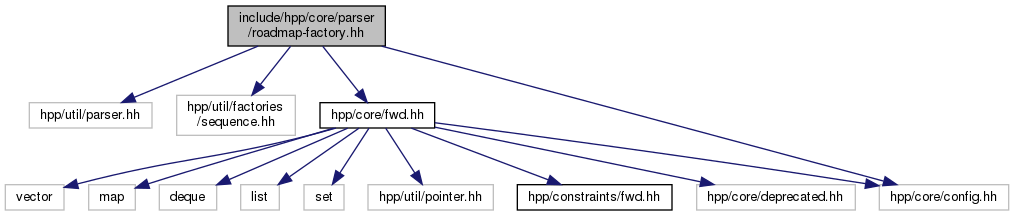
#include <hpp/util/parser.hh>#include <hpp/util/factories/sequence.hh>#include <hpp/core/fwd.hh>#include <hpp/core/config.hh>
Include dependency graph for roadmap-factory.hh:
Go to the source code of this file.
Classes | |
| class | hpp::core::parser::RoadmapFactory |
Namespaces | |
| hpp | |
| hpp::core | |
| hpp::core::parser | |
Typedefs | |
| typedef hpp::util::parser::SequenceFactory< std::string > | hpp::core::parser::StringSequence |
| typedef hpp::util::parser::SequenceFactory< double > | hpp::core::parser::ConfigurationFactory |
| typedef hpp::util::parser::SequenceFactory< unsigned int > | hpp::core::parser::IdSequence |
Functions | |
| void | hpp::core::parser::writeRoadmap (std::ostream &o, const ProblemPtr_t &problem, const RoadmapPtr_t &roadmap) |
| Write roadmap to a text file. More... | |
| RoadmapPtr_t | hpp::core::parser::readRoadmap (const std::string &filename, const ProblemPtr_t &problem) |
| Create a new roadmap from a file. More... | |
| RoadmapPtr_t | hpp::core::parser::readRoadmap (const std::string &filename, const RoadmapPtr_t &roadmap, const ProblemPtr_t &problem) |
| Populate an existing roadmap from a file. More... | |
