Public Types |
Public Member Functions |
Static Public Member Functions |
Public Attributes |
Protected Member Functions |
List of all members
hpp::manipulation::Device Class Reference
#include <hpp/manipulation/device.hh>
Inheritance diagram for hpp::manipulation::Device:
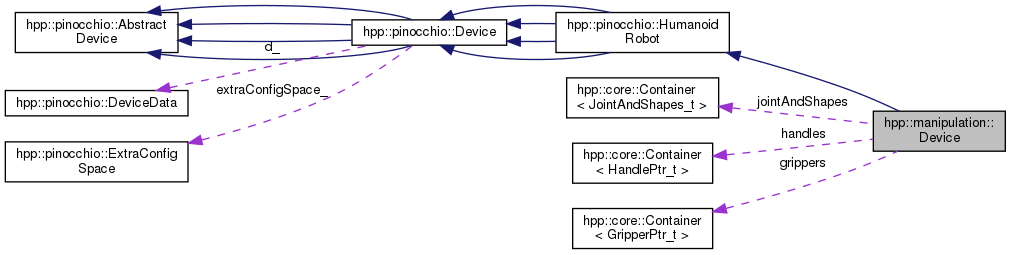
Collaboration diagram for hpp::manipulation::Device:
Public Types | |
| typedef pinocchio::HumanoidRobot | Parent_t |
 Public Types inherited from hpp::pinocchio::Device Public Types inherited from hpp::pinocchio::Device | |
| typedef std::pair< JointPtr_t, JointPtr_t > | CollisionPair_t |
| typedef std::list< CollisionPair_t > | CollisionPairs_t |
| typedef std::pair< JointPtr_t, JointPtr_t > | CollisionPair_t |
| typedef std::list< CollisionPair_t > | CollisionPairs_t |
| typedef std::pair< JointPtr_t, JointPtr_t > | CollisionPair_t |
| typedef std::list< CollisionPair_t > | CollisionPairs_t |
| typedef std::pair< JointPtr_t, JointPtr_t > | CollisionPair_t |
| typedef std::list< CollisionPair_t > | CollisionPairs_t |
Static Public Member Functions | |
| static DevicePtr_t | create (const std::string &name) |
| Static Public Member Functions inherited from hpp::pinocchio::HumanoidRobot | |
| static HumanoidRobotPtr_t | create (const std::string &name) |
| static HumanoidRobotPtr_t | create (const std::string &name) |
| static HumanoidRobotPtr_t | create (const std::string &name) |
| static HumanoidRobotPtr_t | create (const std::string &name) |
| Static Public Member Functions inherited from hpp::pinocchio::Device | |
| static DevicePtr_t | create (const std::string &name) |
| static DevicePtr_t | createCopy (const DevicePtr_t &device) |
| static DevicePtr_t | createCopyConst (const DeviceConstPtr_t &device) |
| static DevicePtr_t | create (const std::string &name) |
| static DevicePtr_t | createCopy (const DevicePtr_t &device) |
| static DevicePtr_t | createCopyConst (const DeviceConstPtr_t &device) |
| static DevicePtr_t | create (const std::string &name) |
| static DevicePtr_t | createCopy (const DevicePtr_t &device) |
| static DevicePtr_t | createCopyConst (const DeviceConstPtr_t &device) |
| static DevicePtr_t | create (const std::string &name) |
| static DevicePtr_t | createCopy (const DevicePtr_t &device) |
| static DevicePtr_t | createCopyConst (const DeviceConstPtr_t &device) |
Public Attributes | |
| core::Container< HandlePtr_t > | handles |
| core::Container< GripperPtr_t > | grippers |
| core::Container< JointAndShapes_t > | jointAndShapes |
Protected Member Functions | |
| Device (const std::string &name) | |
| void | init (const DeviceWkPtr_t &self) |
| void | initCopy (const DeviceWkPtr_t &self, const Device &other) |
| Protected Member Functions inherited from hpp::pinocchio::HumanoidRobot | |
| HumanoidRobot (const std::string &name) | |
| HumanoidRobot (const HumanoidRobot &other) | |
| void | init (const HumanoidRobotWkPtr_t &weakPtr) |
| void | initCopy (const HumanoidRobotWkPtr_t &weakPtr, const HumanoidRobot &other) |
| HumanoidRobot (const std::string &name) | |
| HumanoidRobot (const HumanoidRobot &other) | |
| void | init (const HumanoidRobotWkPtr_t &weakPtr) |
| void | initCopy (const HumanoidRobotWkPtr_t &weakPtr, const HumanoidRobot &other) |
| HumanoidRobot (const std::string &name) | |
| HumanoidRobot (const HumanoidRobot &other) | |
| void | init (const HumanoidRobotWkPtr_t &weakPtr) |
| void | initCopy (const HumanoidRobotWkPtr_t &weakPtr, const HumanoidRobot &other) |
| HumanoidRobot (const std::string &name) | |
| HumanoidRobot (const HumanoidRobot &other) | |
| void | init (const HumanoidRobotWkPtr_t &weakPtr) |
| void | initCopy (const HumanoidRobotWkPtr_t &weakPtr, const HumanoidRobot &other) |
| Protected Member Functions inherited from hpp::pinocchio::Device | |
| Device (const std::string &name) | |
| void | init (const DeviceWkPtr_t &weakPtr) |
| void | initCopy (const DeviceWkPtr_t &weakPtr, const Device &other) |
| Device (const Device &device) | |
| DeviceData & | d () |
| DeviceData const & | d () const |
| void | invalidate () |
| Device (const std::string &name) | |
| void | init (const DeviceWkPtr_t &weakPtr) |
| void | initCopy (const DeviceWkPtr_t &weakPtr, const Device &other) |
| Device (const Device &device) | |
| DeviceData & | d () |
| DeviceData const & | d () const |
| void | invalidate () |
| Device (const std::string &name) | |
| void | init (const DeviceWkPtr_t &weakPtr) |
| void | initCopy (const DeviceWkPtr_t &weakPtr, const Device &other) |
| Device (const Device &device) | |
| DeviceData & | d () |
| DeviceData const & | d () const |
| void | invalidate () |
| Device (const std::string &name) | |
| void | init (const DeviceWkPtr_t &weakPtr) |
| void | initCopy (const DeviceWkPtr_t &weakPtr, const Device &other) |
| Device (const Device &device) | |
| DeviceData & | d () |
| DeviceData const & | d () const |
| void | invalidate () |
| Protected Member Functions inherited from hpp::pinocchio::AbstractDevice | |
| AbstractDevice () | |
| AbstractDevice (const ModelPtr_t &m, const GeomModelPtr_t &gm) | |
| AbstractDevice () | |
| AbstractDevice (const ModelPtr_t &m, const GeomModelPtr_t &gm) | |
| AbstractDevice () | |
| AbstractDevice (const ModelPtr_t &m, const GeomModelPtr_t &gm) | |
| AbstractDevice () | |
| AbstractDevice (const ModelPtr_t &m, const GeomModelPtr_t &gm) | |
Additional Inherited Members | |
| Protected Attributes inherited from hpp::pinocchio::Device | |
| DeviceData | d_ |
| std::string | name_ |
| Grippers_t | grippers_ |
| LiegroupSpacePtr_t | configSpace_ |
| LiegroupSpacePtr_t | configSpaceRnxSOn_ |
| ExtraConfigSpace | extraConfigSpace_ |
| std::vector< JointLinearConstraint > | jointConstraints_ |
| DeviceWkPtr_t | weakPtr_ |
| Protected Attributes inherited from hpp::pinocchio::AbstractDevice | |
| ModelPtr_t | model_ |
| GeomModelPtr_t | geomModel_ |
Detailed Description
Device with handles.
As a deriving class of hpp::pinocchio::HumanoidRobot, it is compatible with hpp::pinocchio::urdf::loadHumanoidRobot
This class also contains pinocchio::Gripper, Handle and JointAndShapes_t
Member Typedef Documentation
◆ Parent_t
| typedef pinocchio::HumanoidRobot hpp::manipulation::Device::Parent_t |
Constructor & Destructor Documentation
◆ Device()
|
inlineprotected |
Constructor
- Parameters
-
name of the new instance, robot Robots that manipulate objects, objects Set of objects manipulated by the robot.
Member Function Documentation
◆ clone()
|
virtual |
Reimplemented from hpp::pinocchio::HumanoidRobot.
◆ create()
|
inlinestatic |
Constructor
- Parameters
-
name of the new instance,
◆ init()
|
inlineprotected |
◆ initCopy()
|
inlineprotected |
◆ print()
|
virtual |
Print object in a stream.
Reimplemented from hpp::pinocchio::Device.
◆ robotFrames()
| FrameIndices_t hpp::manipulation::Device::robotFrames | ( | const std::string & | robotName | ) | const |
◆ robotNames()
| std::vector<std::string> hpp::manipulation::Device::robotNames | ( | ) | const |
◆ setRobotRootPosition()
| void hpp::manipulation::Device::setRobotRootPosition | ( | const std::string & | robotName, |
| const Transform3f & | positionWRTParentJoint | ||
| ) |
Member Data Documentation
◆ grippers
| core::Container<GripperPtr_t> hpp::manipulation::Device::grippers |
◆ handles
| core::Container<HandlePtr_t> hpp::manipulation::Device::handles |
◆ jointAndShapes
| core::Container<JointAndShapes_t> hpp::manipulation::Device::jointAndShapes |
The documentation for this class was generated from the following file:
- include/hpp/manipulation/device.hh
