#include <hpp/constraints/differentiable-function.hh>
Public Member Functions | |
| virtual | ~DifferentiableFunction () |
| LiegroupElement | operator() (vectorIn_t argument) const |
| void | value (LiegroupElementRef result, vectorIn_t argument) const |
| void | jacobian (matrixOut_t jacobian, vectorIn_t argument) const |
| const ArrayXb & | activeParameters () const |
| const ArrayXb & | activeDerivativeParameters () const |
| size_type | inputSize () const |
| Get dimension of input vector. | |
| size_type | inputDerivativeSize () const |
| LiegroupSpacePtr_t | outputSpace () const |
| Get output space. | |
| size_type | outputSize () const |
| Get dimension of output vector. | |
| size_type | outputDerivativeSize () const |
| Get dimension of output derivative vector. | |
| const std::string & | name () const |
| Get function name. | |
| virtual std::ostream & | print (std::ostream &o) const |
| Display object in a stream. | |
| std::string | context () const |
| void | context (const std::string &c) |
| void | finiteDifferenceForward (matrixOut_t jacobian, vectorIn_t arg, DevicePtr_t robot=DevicePtr_t(), value_type eps=std::sqrt(Eigen::NumTraits< value_type >::epsilon())) const |
| void | finiteDifferenceCentral (matrixOut_t jacobian, vectorIn_t arg, DevicePtr_t robot=DevicePtr_t(), value_type eps=std::sqrt(Eigen::NumTraits< value_type >::epsilon())) const |
| bool | operator== (DifferentiableFunction const &other) const |
| bool | operator!= (DifferentiableFunction const &b) const |
| virtual std::pair< JointConstPtr_t, JointConstPtr_t > | dependsOnRelPoseBetween (DeviceConstPtr_t) const |
Protected Member Functions | |
| DifferentiableFunction (size_type sizeInput, size_type sizeInputDerivative, size_type sizeOutput, std::string name=std::string()) | |
| Concrete class constructor should call this constructor. | |
| DifferentiableFunction (size_type sizeInput, size_type sizeInputDerivative, const LiegroupSpacePtr_t &outputSpace, std::string name=std::string()) | |
| Concrete class constructor should call this constructor. | |
| virtual void | impl_compute (LiegroupElementRef result, vectorIn_t argument) const =0 |
| User implementation of function evaluation. | |
| virtual void | impl_jacobian (matrixOut_t jacobian, vectorIn_t arg) const =0 |
| virtual bool | isEqual (const DifferentiableFunction &other) const |
| DifferentiableFunction () | |
Protected Attributes | |
| size_type | inputSize_ |
| Dimension of input vector. | |
| size_type | inputDerivativeSize_ |
| Dimension of input derivative. | |
| LiegroupSpacePtr_t | outputSpace_ |
| Dimension of output vector. | |
| ArrayXb | activeParameters_ |
| ArrayXb | activeDerivativeParameters_ |
Friends | |
| class | DifferentiableFunctionSet |
Detailed Description
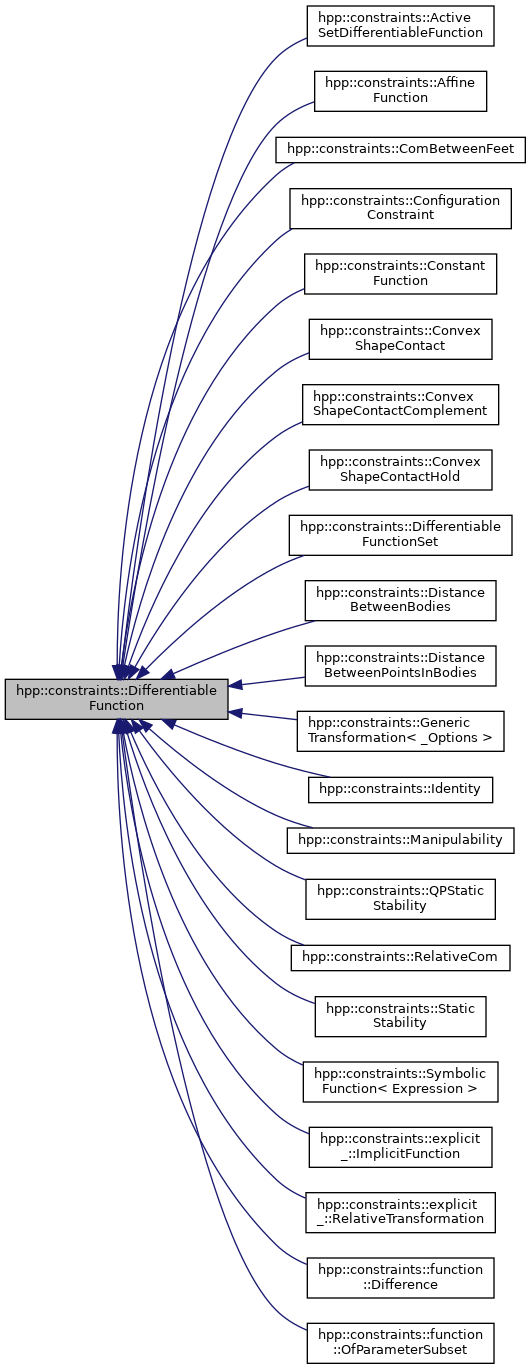
Differentiable function from a Lie group, for instance the configuration space of a robot (hpp::pinocchio::Device) to a another Lie group.
Note that the input Lie group is only represented by the sizes of the elements and of the velocities: methods inputSize and inputDerivativeSize
The output space can be accessed by method outputSpace.
The value of the function for a given input can be accessed by method value . The Jacobian of the function for a given input can be accessed by method jacobian .
Constructor & Destructor Documentation
◆ ~DifferentiableFunction()
|
inlinevirtual |
◆ DifferentiableFunction() [1/3]
|
protected |
Concrete class constructor should call this constructor.
- Parameters
-
sizeInput dimension of the function input sizeInputDerivative dimension of the function input derivative, sizeOutput dimension of the output, name function's name
◆ DifferentiableFunction() [2/3]
|
protected |
Concrete class constructor should call this constructor.
- Parameters
-
sizeInput dimension of the function input sizeInputDerivative dimension of the function input derivative, outputSpace output space of the function. name function name
◆ DifferentiableFunction() [3/3]
|
inlineprotected |
Member Function Documentation
◆ activeDerivativeParameters()
|
inline |
Returns a vector of booleans that indicates whether the corresponding velocity parameter influences this constraints.
◆ activeParameters()
|
inline |
Returns a vector of booleans that indicates whether the corresponding configuration parameter influences this constraints.
◆ context() [1/2]
|
inline |
◆ context() [2/2]
|
inline |
◆ dependsOnRelPoseBetween()
|
inlinevirtual |
Return pair of joints the relative pose between which modifies the function value if any
This method is useful to know whether an instance of Implicit constrains the relative pose between two joints.
- Returns
- the pair of joints involved, arranged in order of increasing joint index, or a pair of empty shared pointers.
- Note
- if absolute pose (relative pose with respect to "universe"), "universe" is returned as empty shared pointer
- child class reimplementing this may require a valid "robot" argument, which the constraints are applied on.
Reimplemented in hpp::constraints::explicit_::ImplicitFunction, hpp::constraints::ConvexShapeContact, hpp::constraints::ConvexShapeContactComplement, hpp::constraints::ConvexShapeContactHold, hpp::constraints::explicit_::RelativeTransformation, and hpp::constraints::GenericTransformation< _Options >.
◆ finiteDifferenceCentral()
| void hpp::constraints::DifferentiableFunction::finiteDifferenceCentral | ( | matrixOut_t | jacobian, |
| vectorIn_t | arg, | ||
| DevicePtr_t | robot = DevicePtr_t(), |
||
| value_type | eps = std::sqrt(Eigen::NumTraits< value_type >::epsilon()) |
||
| ) | const |
Approximate the jacobian using forward finite difference.
- Return values
-
jacobian jacobian will be stored in this argument
- Parameters
-
arg point at which the jacobian will be computed robot use to add configuration and velocities. If set to NULL, the configuration space is considered a vector space. eps refers to \(\epsilon\) in http://en.wikipedia.org/wiki/Numerical_differentiation Evaluate the function 2*x.size() times but more precise the finiteDifferenceForward
◆ finiteDifferenceForward()
| void hpp::constraints::DifferentiableFunction::finiteDifferenceForward | ( | matrixOut_t | jacobian, |
| vectorIn_t | arg, | ||
| DevicePtr_t | robot = DevicePtr_t(), |
||
| value_type | eps = std::sqrt(Eigen::NumTraits< value_type >::epsilon()) |
||
| ) | const |
Approximate the jacobian using forward finite difference.
- Return values
-
jacobian jacobian will be stored in this argument
- Parameters
-
arg point at which the jacobian will be computed robot use to add configuration and velocities. If set to NULL, the configuration space is considered a vector space. eps refers to \(\epsilon\) in http://en.wikipedia.org/wiki/Numerical_differentiation Evaluate the function (x.size() + 1) times but less precise the finiteDifferenceCentral
◆ impl_compute()
|
protectedpure virtual |
User implementation of function evaluation.
Implemented in hpp::constraints::ConstantFunction, hpp::constraints::ActiveSetDifferentiableFunction, hpp::constraints::ConvexShapeContactHold, hpp::constraints::explicit_::ImplicitFunction, hpp::constraints::explicit_::RelativeTransformation, hpp::constraints::Manipulability, hpp::constraints::Identity, hpp::constraints::function::Difference, and hpp::constraints::function::OfParameterSubset.
◆ impl_jacobian()
|
protectedpure virtual |
Implemented in hpp::constraints::function::Difference, hpp::constraints::function::OfParameterSubset, hpp::constraints::Identity, hpp::constraints::ConstantFunction, hpp::constraints::ActiveSetDifferentiableFunction, hpp::constraints::ConvexShapeContactHold, hpp::constraints::explicit_::ImplicitFunction, hpp::constraints::explicit_::RelativeTransformation, and hpp::constraints::Manipulability.
◆ inputDerivativeSize()
|
inline |
Get dimension of input derivative vector
The dimension of configuration vectors might differ from the dimension of velocity vectors since some joints are represented by non minimal size vectors: e.g. quaternion for SO(3)
◆ inputSize()
|
inline |
Get dimension of input vector.
◆ isEqual()
|
inlineprotectedvirtual |
Reimplemented in hpp::constraints::ActiveSetDifferentiableFunction, hpp::constraints::Identity, hpp::constraints::AffineFunction, hpp::constraints::ConstantFunction, hpp::constraints::ComBetweenFeet, hpp::constraints::ConfigurationConstraint, hpp::constraints::ConvexShapeContact, hpp::constraints::ConvexShapeContactComplement, hpp::constraints::ConvexShapeContactHold, hpp::constraints::DifferentiableFunctionSet, hpp::constraints::DistanceBetweenBodies, hpp::constraints::DistanceBetweenPointsInBodies, hpp::constraints::explicit_::ImplicitFunction, hpp::constraints::explicit_::RelativeTransformation, hpp::constraints::function::Difference, hpp::constraints::function::OfParameterSubset, hpp::constraints::GenericTransformation< _Options >, hpp::constraints::Manipulability, hpp::constraints::QPStaticStability, hpp::constraints::RelativeCom, hpp::constraints::StaticStability, and hpp::constraints::SymbolicFunction< Expression >.
◆ jacobian()
|
inline |
Computes the jacobian.
- Return values
-
jacobian jacobian will be stored in this argument
- Parameters
-
argument point at which the jacobian will be computed
◆ name()
|
inline |
Get function name.
- Returns
- Function name.
◆ operator!=()
| bool hpp::constraints::DifferentiableFunction::operator!= | ( | DifferentiableFunction const & | b | ) | const |
◆ operator()()
|
inline |
Evaluate the function at a given parameter.
- Note
- parameters should be of the correct size.
◆ operator==()
| bool hpp::constraints::DifferentiableFunction::operator== | ( | DifferentiableFunction const & | other | ) | const |
◆ outputDerivativeSize()
|
inline |
Get dimension of output derivative vector.
◆ outputSize()
|
inline |
Get dimension of output vector.
◆ outputSpace()
|
inline |
Get output space.
◆ print()
|
virtual |
Display object in a stream.
Reimplemented in hpp::constraints::ConfigurationConstraint, hpp::constraints::ConvexShapeContact, hpp::constraints::GenericTransformation< _Options >, hpp::constraints::RelativeCom, hpp::constraints::DifferentiableFunctionSet, hpp::constraints::function::Difference, and hpp::constraints::function::OfParameterSubset.
◆ value()
|
inline |
Evaluate the function at a given parameter.
- Note
- parameters should be of the correct size.
Friends And Related Symbol Documentation
◆ DifferentiableFunctionSet
|
friend |
Member Data Documentation
◆ activeDerivativeParameters_
|
protected |
Initialized to true by this class. Child class are responsible for updating it.
- See also
- activeDerivativeParameters
◆ activeParameters_
|
protected |
Initialized to true by this class. Child class are responsible for updating it.
- See also
- activeParameters
◆ inputDerivativeSize_
|
protected |
Dimension of input derivative.
◆ inputSize_
|
protected |
Dimension of input vector.
◆ outputSpace_
|
protected |
Dimension of output vector.
The documentation for this class was generated from the following file:
- include/hpp/constraints/differentiable-function.hh