#include <hpp/constraints/implicit.hh>
Public Member Functions | |
| bool | operator== (const Implicit &other) const |
| Operator equality. | |
| Implicit & | operator= (const Implicit &other) |
| Operator assignation. | |
| virtual ImplicitPtr_t | copy () const |
| Copy object and return shared pointer to copy. | |
| virtual | ~Implicit () |
| const ComparisonTypes_t & | comparisonType () const |
| Return the ComparisonType. | |
| void | comparisonType (const ComparisonTypes_t &comp) |
| Set the comparison type. | |
| const segments_t & | activeRows () const |
| bool | checkAllRowsActive () const |
| Check if all rows are active (no inactive rows) | |
| const Eigen::RowBlockIndices & | equalityIndices () const |
| Get indices of constraint coordinates that are equality. | |
| void | setInactiveRowsToZero (vectorOut_t error) const |
| DifferentiableFunction & | function () const |
| Return a reference to function \(h\). | |
| const DifferentiableFunctionPtr_t & | functionPtr () const |
| Return a reference to function \(h\). | |
| virtual std::pair< JointConstPtr_t, JointConstPtr_t > | doesConstrainRelPoseBetween (DeviceConstPtr_t robot) const |
Right hand side | |
| void | rightHandSideFromConfig (ConfigurationIn_t config, LiegroupElementRef rhs) |
| bool | checkRightHandSide (LiegroupElementConstRef rhs) const |
| size_type | parameterSize () const |
| size_type | rightHandSideSize () const |
| void | rightHandSideFunction (const DifferentiableFunctionPtr_t &rhsF) |
| const DifferentiableFunctionPtr_t & | rightHandSideFunction () const |
| vectorIn_t | rightHandSideAt (const value_type &s) |
Static Public Member Functions | |
| static ImplicitPtr_t | create (const DifferentiableFunctionPtr_t &func, ComparisonTypes_t comp, std::vector< bool > mask=std::vector< bool >()) |
| static ImplicitPtr_t | createCopy (const ImplicitPtr_t &other) |
| Create a copy and return shared pointer. | |
Protected Member Functions | |
| Implicit (const DifferentiableFunctionPtr_t &function, ComparisonTypes_t comp, std::vector< bool > mask) | |
| Implicit (const Implicit &other) | |
| Copy constructor. | |
| virtual bool | isEqual (const Implicit &other, bool swapAndTest) const |
| void | init (const ImplicitWkPtr_t &weak) |
| Implicit () | |
Friends | |
| class | ImplicitConstraintSet |
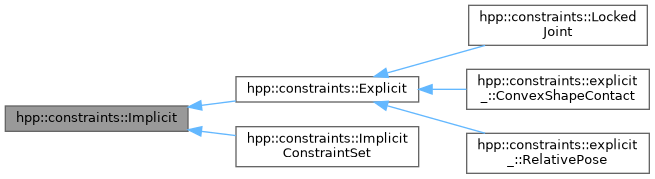
Detailed Description
This class represents a parameterizable numerical constraint that compares the output of a function \(h\) to a right hand side Lie group element.
- Definition
- The function \(h\) takes input in a configuration space \(\mathcal{C}\) and output in a Lie group \(\mathbf{L}\),
- the dimensions of \(\mathbf{L}\) and of its tangent space are respectively \((n_q,n_v)\).
- The comparison is represented by a vector \(\mathbf{c}\) of dimension \(n_v\) with values in enum hpp::constraints::ComparisonType = { \(\mathbf{Equality}\), \(\mathbf{EqualToZero}\), \(\mathbf{Inferior}\), \(\mathbf{Superior}\) }.
- The right hand side is Lie group element of dimension \(n_q\).
- Error
A configuration \(\mathbf{q}\) is said to satisfy the constraint for a given right hand side if and only if the error \(e\) as computed below is smaller in norm than a given threshold.
Let
\[ \Delta = h (\mathbf{q}) - rhs \in \mathbf{R}^{n_v}, \]
for each component \(i\in\{0,\cdots,n_v-1\}\),
- if \(c_i\) is \(\mathbf{Inferior}\), \(e_i = \max (0,\Delta_i)\),
- if \(c_i\) is \(\mathbf{Superior}\), \(e_i = \min (0,\Delta_i)\),
- if \(c_i\) is \(\mathbf{Equality}\), \(e_i = \Delta_i\),
- if \(c_i\) is \(\mathbf{EqualToZero}\), \(e_i = \Delta_i\).
- Mask
A mask is a vector of Boolean values of size \(n_v\). Values set to false means that the corresponding component of the error defined above is not taken into account to determine whether the constraint is satisfied. The active rows of the constraint may be accessed via method activeRows.
- Parameterizable right hand side
Lines with \(\mathbf{Equality}\) comparator in the above definition of the error need a parameter, while lines with comparators \(\mathbf{Inferior}\), \(\mathbf{Superior}\), or \(\mathbf{EqualToZero}\) do not. As a consequence, the right hand side of the constraint is defined by a vector \(\lambda\) of parameters of size the number of \(\mathbf{Equality}\) occurences in vector \(\mathbf{c}\). The right hand side is then defined as in the following example:
\[ rhs = \exp\left(\begin{array}{c}\lambda_1 \\ 0 \\ 0 \\ \lambda_2 \\ \vdots \end{array}\right) \ \ \ \ \mathbf{c} = \left(\begin{array}{c}\mathbf{Equality} \\ \mathbf{EqualToZero} \\ \mathbf{Inferior} \\ \mathbf{Equality} \\ \vdots \end{array}\right) \]
To retrieve the size of vector \(\lambda\), call method Implicit::parameterSize (). To set and get the right hand side value, use method Implicit::rightHandSide.
- Time varying right hand side
The right hand side of the constraint may depend on time, for instance if the constraint is associated to a trajectory following task. In this case, the right hand side is a function from \(\mathbf{R}\) to \(\mathbf{L}\).
Constructor & Destructor Documentation
◆ ~Implicit()
|
inlinevirtual |
◆ Implicit() [1/3]
|
protected |
Constructor
- Parameters
-
function the differentiable function comp vector of comparison \(\mathbf{c}\). mask mask defining which components of the error are taken into account to determine whether the constraint is satisfied. \precond sizes of comp and of mask should be equal to size of tangent space to function output space \(\mathbf{L}\).
◆ Implicit() [2/3]
|
protected |
Copy constructor.
◆ Implicit() [3/3]
|
inlineprotected |
Member Function Documentation
◆ activeRows()
|
inline |
Return the active rows taken into account to determine whether the constraint is satisfied
◆ checkAllRowsActive()
|
inline |
Check if all rows are active (no inactive rows)
◆ checkRightHandSide()
| bool hpp::constraints::Implicit::checkRightHandSide | ( | LiegroupElementConstRef | rhs | ) | const |
Check right hand side with regard to comparison types
- Parameters
-
rhs right hand side,
- Returns
- true if right hand side is correct
This method checks that elements of the right hand side log corresponding to comparison types different from Equality are equal to 0.
◆ comparisonType() [1/2]
| const ComparisonTypes_t & hpp::constraints::Implicit::comparisonType | ( | ) | const |
Return the ComparisonType.
◆ comparisonType() [2/2]
| void hpp::constraints::Implicit::comparisonType | ( | const ComparisonTypes_t & | comp | ) |
Set the comparison type.
◆ copy()
|
virtual |
Copy object and return shared pointer to copy.
Reimplemented in hpp::constraints::Explicit, hpp::constraints::explicit_::ConvexShapeContact, hpp::constraints::explicit_::RelativePose, and hpp::constraints::LockedJoint.
◆ create()
|
static |
Create a shared pointer to a new instance.
- See also
- constructors
◆ createCopy()
|
static |
Create a copy and return shared pointer.
◆ doesConstrainRelPoseBetween()
|
virtual |
Get pair of joints whose relative pose is fully constrained
If the function value depends on the relative pose between j1 and j2 and if the relative pose between j1 and j2 is fully constrained because of Implicit constraint (relative transformation may still differ from one path to another), return these two joints.
- Parameters
-
robot the device that this constraint is applied to
- Returns
- the pair of joints constrained, in order of increasing joint index, or a pair of empty shared pointers
- Note
- absolute pose is considered relative pose with respect to "universe". "universe" is returned as a nullpointer as the first element of the pair, if applicable.
Reimplemented in hpp::constraints::LockedJoint.
◆ equalityIndices()
|
inline |
Get indices of constraint coordinates that are equality.
◆ function()
|
inline |
Return a reference to function \(h\).
◆ functionPtr()
|
inline |
Return a reference to function \(h\).
◆ init()
|
inlineprotected |
◆ isEqual()
|
protectedvirtual |
Test equality with other instance
- Parameters
-
other object to copy swapAndTest whether we should also check other == this
Reimplemented in hpp::constraints::Explicit, and hpp::constraints::LockedJoint.
◆ operator=()
Operator assignation.
◆ operator==()
| bool hpp::constraints::Implicit::operator== | ( | const Implicit & | other | ) | const |
Operator equality.
◆ parameterSize()
| size_type hpp::constraints::Implicit::parameterSize | ( | ) | const |
Get size of parameter defining the right hand side of the constraint
See class documentation for details.
◆ rightHandSideAt()
| vectorIn_t hpp::constraints::Implicit::rightHandSideAt | ( | const value_type & | s | ) |
Evaluate and set right hand side at given time
- Parameters
-
s time
◆ rightHandSideFromConfig()
| void hpp::constraints::Implicit::rightHandSideFromConfig | ( | ConfigurationIn_t | config, |
| LiegroupElementRef | rhs | ||
| ) |
Computes the right hand side from a configuration
in such a way that the configuration satisfies the numerical constraints
- Parameters
-
config the input configuration.
- Return values
-
rhs right hand side as a Lie group element. \precond rhs should be initialized with the right LiegroupSpace (ie the output space of the function).
- Warning
- Only values of the right hand side corresponding to "equality constraints" are set. As a result, the input configuration may not satisfy the other constraints.
◆ rightHandSideFunction() [1/2]
|
inline |
Get time-varying right hand side
- Returns
- the mapping from \(\mathbf{R}\) to output space \(\mathbf{L}\) of \(h\) defining the variation along time of the right hand side.
◆ rightHandSideFunction() [2/2]
| void hpp::constraints::Implicit::rightHandSideFunction | ( | const DifferentiableFunctionPtr_t & | rhsF | ) |
Set time-varying right hand side
- Parameters
-
rhsF Mapping from \(\mathbf{R}\) to output space \(\mathbf{L}\) of \(h\) defining the variation along time of the right hand side.
◆ rightHandSideSize()
| size_type hpp::constraints::Implicit::rightHandSideSize | ( | ) | const |
Get size of right hand side of the constraint
This is the dimension (nq) of the output space of the function
◆ setInactiveRowsToZero()
| void hpp::constraints::Implicit::setInactiveRowsToZero | ( | vectorOut_t | error | ) | const |
Set inactive components of error to 0
- Return values
-
error error vector computed by substracting a right hand side to the output to the value of the function.
Friends And Related Symbol Documentation
◆ ImplicitConstraintSet
|
friend |
The documentation for this class was generated from the following file:
- include/hpp/constraints/implicit.hh