Loading...
Searching...
No Matches
constraints-fwd.hh File Reference
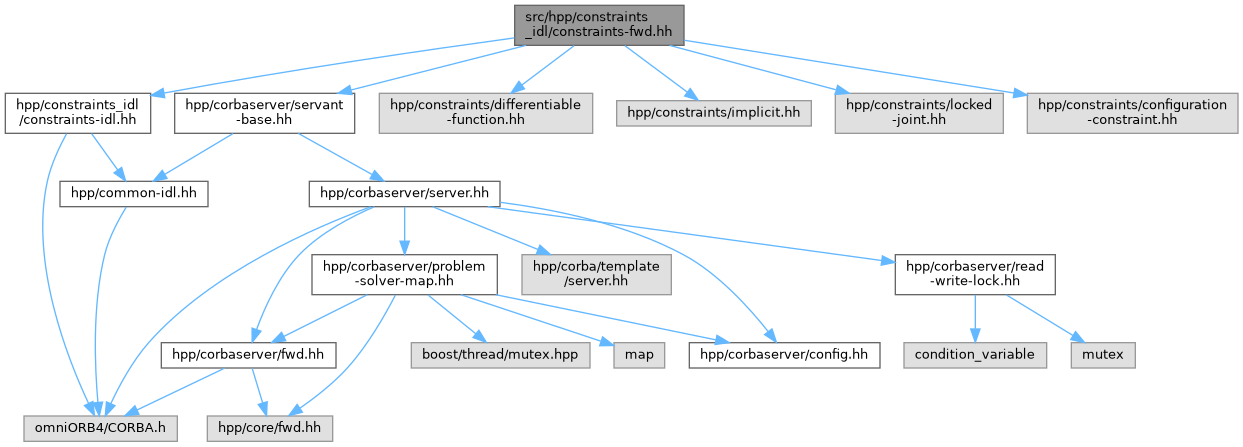
#include <hpp/constraints_idl/constraints-idl.hh>#include "hpp/corbaserver/servant-base.hh"#include <hpp/constraints/differentiable-function.hh>#include <hpp/constraints/implicit.hh>#include <hpp/constraints/locked-joint.hh>#include <hpp/constraints/configuration-constraint.hh>
Include dependency graph for constraints-fwd.hh:
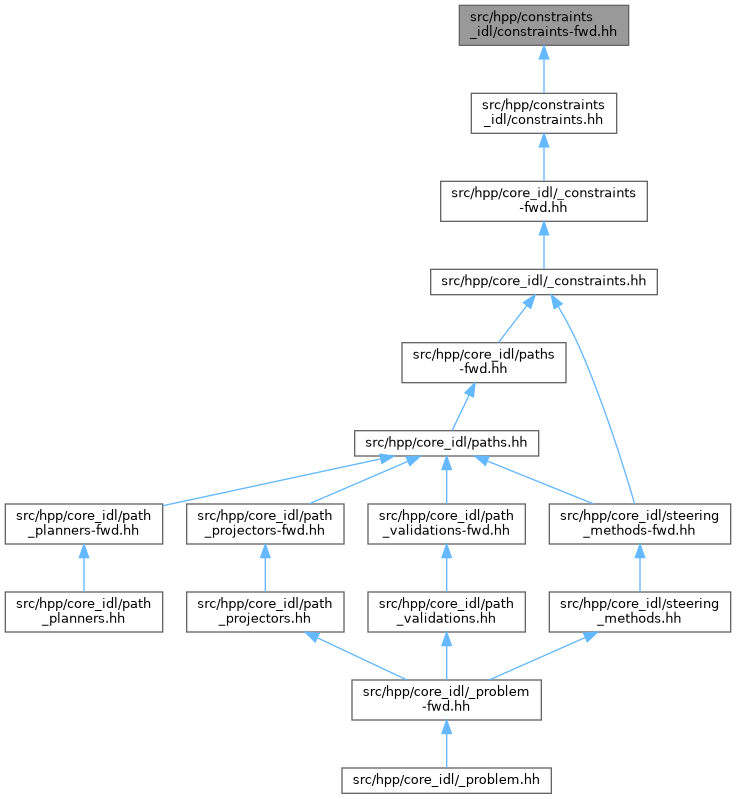
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | hpp |
| Implement CORBA interface `‘Obstacle’'. | |
| namespace | hpp::constraints_impl |
| namespace | hpp::corbaServer |
Typedefs | |
| typedef DifferentiableFunctionServant< POA_hpp::constraints_idl::DifferentiableFunction, hpp::weak_ptr< hpp::constraints::DifferentiableFunction > > | hpp::constraints_impl::DifferentiableFunction |
| typedef ImplicitServant< POA_hpp::constraints_idl::Implicit, hpp::weak_ptr< hpp::constraints::Implicit > > | hpp::constraints_impl::Implicit |
| typedef LockedJointServant< POA_hpp::constraints_idl::LockedJoint, hpp::weak_ptr< hpp::constraints::LockedJoint > > | hpp::constraints_impl::LockedJoint |
| typedef ConfigurationConstraintServant< POA_hpp::constraints_idl::ConfigurationConstraint, hpp::weak_ptr< hpp::constraints::ConfigurationConstraint > > | hpp::constraints_impl::ConfigurationConstraint |