Loading...
Searching...
No Matches
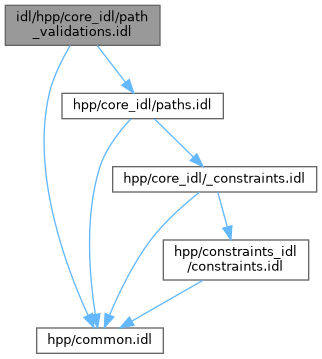
Include dependency graph for path_validations.idl:
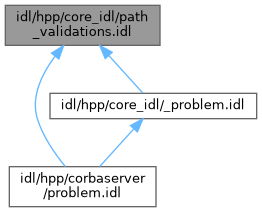
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| interface | hpp::core_idl::ConfigValidation |
| interface | hpp::core_idl::ConfigValidations |
| interface | hpp::core_idl::CollisionValidation |
| interface | hpp::core_idl::PathValidation |
| interface | hpp::core_idl::PathValidations |
| interface | hpp::core_idl::ContinuousValidation |
| interface | hpp::core_idl::pathValidation_idl::Discretized |
Modules | |
| namespace | hpp |
| Implement CORBA interface `‘Obstacle’'. | |
| module | hpp::core_idl |
| module | hpp::core_idl::pathValidation_idl |
Macros | |
| #define | HPP_CORE_OBSTACLE_USER_INTERFACE |
Typedefs | |
| typedef string | hpp::core_idl::ValidationReport |
| typedef string | hpp::core_idl::PathValidationReport |
| typedef intSeqSeq | hpp::core_idl::RelativeMotionMatrix |
Macro Definition Documentation
◆ HPP_CORE_OBSTACLE_USER_INTERFACE
| #define HPP_CORE_OBSTACLE_USER_INTERFACE |
Value:
void setSecurityMarginBetweenBodies(in string body_a, in string body_b, in value_type margin) raises(Error); \
Definition common-idl.hh:302
Definition common-idl.hh:803
Definition common-idl.hh:575