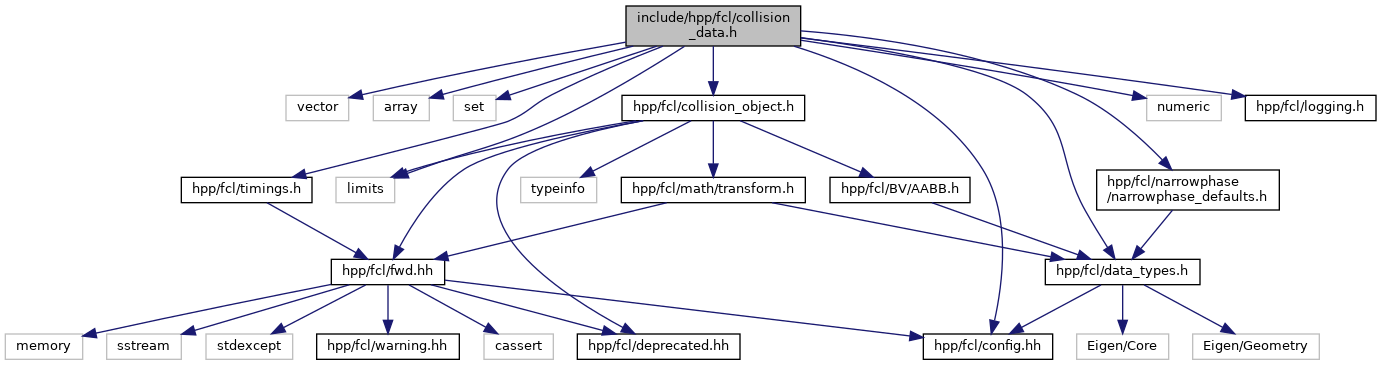
#include <vector>
#include <array>
#include <set>
#include <limits>
#include <numeric>
#include "hpp/fcl/collision_object.h"
#include "hpp/fcl/config.hh"
#include "hpp/fcl/data_types.h"
#include "hpp/fcl/timings.h"
#include "hpp/fcl/narrowphase/narrowphase_defaults.h"
#include "hpp/fcl/logging.h"
Go to the source code of this file.
|
| using | hpp::fcl::SupportSet = ContactPatch |
| | Structure used for internal computations. A support set and a contact patch can be represented by the same structure. In fact, a contact patch is the intersection of two support sets, one with PatchDirection::DEFAULT and one with PatchDirection::INVERTED. More...
|
| |
|
| void | hpp::fcl::constructContactPatchFrameFromContact (const Contact &contact, ContactPatch &contact_patch) |
| | Construct a frame from a Contact's position and normal. Because both Contact's position and normal are expressed in the world frame, this frame is also expressed w.r.t the world frame. The origin of the frame is contact.pos and the z-axis of the frame is contact.normal. More...
|
| |
| void | hpp::fcl::internal::updateDistanceLowerBoundFromBV (const CollisionRequest &, CollisionResult &res, const FCL_REAL sqrDistLowerBound) |
| |
| void | hpp::fcl::internal::updateDistanceLowerBoundFromLeaf (const CollisionRequest &, CollisionResult &res, const FCL_REAL &distance, const Vec3f &p0, const Vec3f &p1, const Vec3f &normal) |
| |
| CollisionRequestFlag | hpp::fcl::operator~ (CollisionRequestFlag a) |
| |
| CollisionRequestFlag | hpp::fcl::operator| (CollisionRequestFlag a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag | hpp::fcl::operator& (CollisionRequestFlag a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag | hpp::fcl::operator^ (CollisionRequestFlag a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag & | hpp::fcl::operator|= (CollisionRequestFlag &a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag & | hpp::fcl::operator&= (CollisionRequestFlag &a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag & | hpp::fcl::operator^= (CollisionRequestFlag &a, CollisionRequestFlag b) |
| |