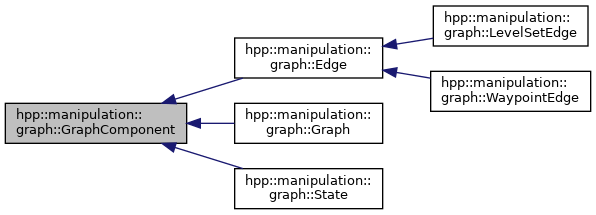
Define common methods of the graph components. More...
#include <hpp/manipulation/graph/graph-component.hh>
Public Member Functions | |
| virtual | ~GraphComponent () |
| const std::string & | name () const |
| Get the component name. More... | |
| const std::size_t & | id () const |
| Return the component id. More... | |
| virtual void | addNumericalConstraint (const ImplicitPtr_t &numConstraint) |
| Add constraint to the component. More... | |
| virtual void | addNumericalCost (const ImplicitPtr_t &numCost) |
| Add a cost function Implicit to the component. More... | |
| virtual void | resetNumericalConstraints () |
| Reset the numerical constraints stored in the component. More... | |
| bool | insertNumericalConstraints (ConfigProjectorPtr_t &proj) const |
| const NumericalConstraints_t & | numericalConstraints () const |
| Get a reference to the NumericalConstraints_t. More... | |
| const NumericalConstraints_t & | numericalCosts () const |
| Get a reference to the NumericalConstraints_t. More... | |
| void | parentGraph (const GraphWkPtr_t &parent) |
| Set the parent graph. More... | |
| GraphPtr_t | parentGraph () const |
| Set the parent graph. More... | |
| virtual std::ostream & | dotPrint (std::ostream &os, dot::DrawingAttributes da=dot::DrawingAttributes()) const |
| Print the component in DOT language. More... | |
| virtual void | invalidate () |
| void | solveLevelByLevel (bool solveLevelByLevel) |
| bool | solveLevelByLevel () const |
Protected Member Functions | |
| void | init (const GraphComponentWkPtr_t &weak) |
| Initialize the component. More... | |
| GraphComponent (const std::string &name) | |
| void | throwIfNotInitialized () const |
| virtual std::ostream & | print (std::ostream &os) const |
| Print the object in a stream. More... | |
| virtual void | populateTooltip (dot::Tooltip &tp) const |
| Populate DrawingAttributes tooltip. More... | |
| virtual void | initialize ()=0 |
Protected Attributes | |
| NumericalConstraints_t | numericalConstraints_ |
| Stores the numerical constraints. More... | |
| NumericalConstraints_t | numericalCosts_ |
| Stores the numerical costs. More... | |
| GraphWkPtr_t | graph_ |
| A weak pointer to the parent graph. More... | |
| bool | isInit_ |
Friends | |
| class | Graph |
| std::ostream & | operator<< (std::ostream &, const GraphComponent &) |
Detailed Description
Define common methods of the graph components.
Constructor & Destructor Documentation
◆ ~GraphComponent()
|
inlinevirtual |
◆ GraphComponent()
|
inlineprotected |
Member Function Documentation
◆ addNumericalConstraint()
|
virtual |
Add constraint to the component.
Reimplemented in hpp::manipulation::graph::State.
◆ addNumericalCost()
|
virtual |
Add a cost function Implicit to the component.
◆ dotPrint()
|
virtual |
Print the component in DOT language.
Reimplemented in hpp::manipulation::graph::State, hpp::manipulation::graph::Graph, hpp::manipulation::graph::LevelSetEdge, hpp::manipulation::graph::WaypointEdge, and hpp::manipulation::graph::Edge.
◆ id()
|
inline |
Return the component id.
◆ init()
|
protected |
Initialize the component.
◆ initialize()
|
protectedpure virtual |
◆ insertNumericalConstraints()
| bool hpp::manipulation::graph::GraphComponent::insertNumericalConstraints | ( | ConfigProjectorPtr_t & | proj | ) | const |
Insert the numerical constraints in a ConfigProjector
- Returns
- true is at least one ImplicitPtr_t was inserted.
◆ invalidate()
|
inlinevirtual |
Invalidate the component The component needs to be initialized again.
Reimplemented in hpp::manipulation::graph::Graph.
◆ name()
| const std::string& hpp::manipulation::graph::GraphComponent::name | ( | ) | const |
Get the component name.
◆ numericalConstraints()
| const NumericalConstraints_t& hpp::manipulation::graph::GraphComponent::numericalConstraints | ( | ) | const |
Get a reference to the NumericalConstraints_t.
◆ numericalCosts()
| const NumericalConstraints_t& hpp::manipulation::graph::GraphComponent::numericalCosts | ( | ) | const |
Get a reference to the NumericalConstraints_t.
◆ parentGraph() [1/2]
| GraphPtr_t hpp::manipulation::graph::GraphComponent::parentGraph | ( | ) | const |
Set the parent graph.
◆ parentGraph() [2/2]
| void hpp::manipulation::graph::GraphComponent::parentGraph | ( | const GraphWkPtr_t & | parent | ) |
Set the parent graph.
◆ populateTooltip()
|
protectedvirtual |
Populate DrawingAttributes tooltip.
Reimplemented in hpp::manipulation::graph::State, and hpp::manipulation::graph::LevelSetEdge.
◆ print()
|
protectedvirtual |
Print the object in a stream.
Reimplemented in hpp::manipulation::graph::State, hpp::manipulation::graph::Graph, hpp::manipulation::graph::LevelSetEdge, hpp::manipulation::graph::WaypointEdge, and hpp::manipulation::graph::Edge.
◆ resetNumericalConstraints()
|
virtual |
Reset the numerical constraints stored in the component.
◆ solveLevelByLevel() [1/2]
|
inline |
Get whether hierachical constraints are solved level by level
- See also
- hpp::constraints::solver::HierarchicalIterative
◆ solveLevelByLevel() [2/2]
|
inline |
Set whether hierachical constraints are solved level by level
- See also
- hpp::constraints::solver::HierarchicalIterative
◆ throwIfNotInitialized()
|
protected |
Friends And Related Function Documentation
◆ Graph
|
friend |
◆ operator<<
|
friend |
Member Data Documentation
◆ graph_
|
protected |
A weak pointer to the parent graph.
◆ isInit_
|
protected |
◆ numericalConstraints_
|
protected |
Stores the numerical constraints.
◆ numericalCosts_
|
protected |
Stores the numerical costs.
The documentation for this class was generated from the following file:
- include/hpp/manipulation/graph/graph-component.hh