Loading...
Searching...
No Matches
device-data.hh File Reference
Include dependency graph for device-data.hh:

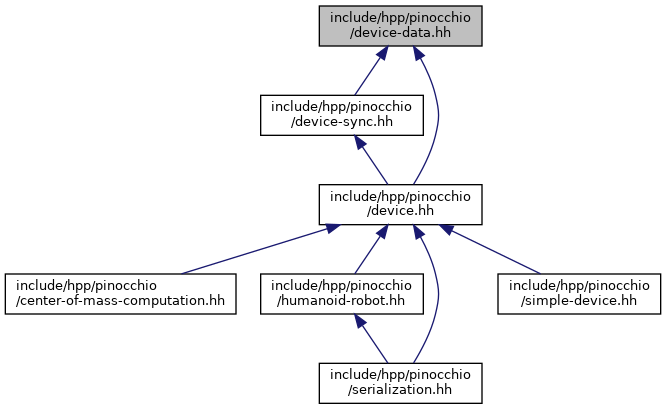
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | hpp::pinocchio::DeviceData |
Namespaces | |
| namespace | hpp |
| Utility functions. | |
| namespace | hpp::pinocchio |
Enumerations | |
| enum | hpp::pinocchio::Computation_t { hpp::pinocchio::JOINT_POSITION = 0x1 , hpp::pinocchio::JACOBIAN = 0x2 , hpp::pinocchio::VELOCITY = 0x4 , hpp::pinocchio::ACCELERATION = 0x8 , hpp::pinocchio::COM = 0xf , hpp::pinocchio::COMPUTE_ALL = 0Xffff } |