Loading...
Searching...
No Matches
effector_spline.h File Reference
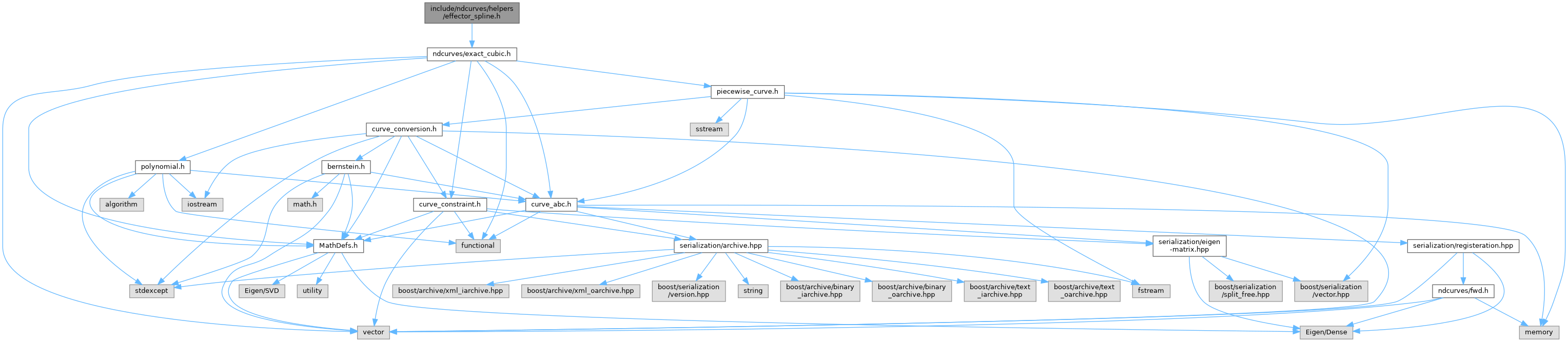
#include "ndcurves/exact_cubic.h"
Include dependency graph for effector_spline.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | ndcurves |
| namespace | ndcurves::helpers |
Typedefs | |
| typedef double | ndcurves::helpers::Numeric |
| typedef double | ndcurves::helpers::Time |
| typedef Eigen::Matrix< Numeric, Eigen::Dynamic, 1 > | ndcurves::helpers::Point |
| typedef std::vector< Point, Eigen::aligned_allocator< Point > > | ndcurves::helpers::T_Point |
| typedef std::pair< double, Point > | ndcurves::helpers::Waypoint |
| typedef std::vector< Waypoint > | ndcurves::helpers::T_Waypoint |
| typedef exact_cubic< Time, Numeric, true, Point, T_Point > | ndcurves::helpers::exact_cubic_t |
| typedef exact_cubic_t::spline_constraints | ndcurves::helpers::spline_constraints_t |
| typedef exact_cubic_t::t_spline_t | ndcurves::helpers::t_spline_t |
| typedef exact_cubic_t::spline_t | ndcurves::helpers::spline_t |
Functions | |
| Waypoint | ndcurves::helpers::compute_offset (const Waypoint &source, const Point &normal, const Numeric offset, const Time time_offset) |
| Compute time such that the equation from source to offsetpoint is necessarily a line. | |
| spline_t | ndcurves::helpers::make_end_spline (const Point &normal, const Point &from, const Numeric offset, const Time init_time, const Time time_offset) |
| Compute spline from land way point to end point. Constraints are null velocity and acceleration. | |
| spline_constraints_t | ndcurves::helpers::compute_required_offset_velocity_acceleration (const spline_t &end_spline, const Time) |
| Compute end velocity : along landing normal and respecting time. | |
| template<typename In > | |
| exact_cubic_t * | ndcurves::helpers::effector_spline (In wayPointsBegin, In wayPointsEnd, const Point &lift_normal=Eigen::Vector3d::UnitZ(), const Point &land_normal=Eigen::Vector3d::UnitZ(), const Numeric lift_offset=0.02, const Numeric land_offset=0.02, const Time lift_offset_duration=0.02, const Time land_offset_duration=0.02) |
| Helper method to create a spline typically used to guide the 3d trajectory of a robot end effector. Given a set of waypoints, and the normal vector of the start and ending positions, automatically create the spline such that: | |
