 |
pinocchio
3.7.0
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
|

|
|
pinocchio
3.7.0
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
|
|
Interface for Pinocchio collision callback functors. More...
#include <pinocchio/collision/broadphase-callbacks.hpp>
Public Member Functions | |
| CollisionCallBackBase (const GeometryModel &geometry_model, GeometryData &geometry_data) | |
| virtual void | done () |
| Callback method called after the termination of a collisition detection algorithm. The default implementation does nothing. | |
| GeometryData & | getGeometryData () |
| const GeometryData & | getGeometryData () const |
| const GeometryModel & | getGeometryModel () const |
| virtual bool | stop () const =0 |
| If true, the stopping criteria related to the collision callback has been met and one can stop. | |
Public Attributes | |
| bool | accumulate |
| Whether the callback is used in an accumulate mode where several collide methods are called successively. | |
| bool | collision |
| Whether there is a collision or not. | |
Protected Attributes | |
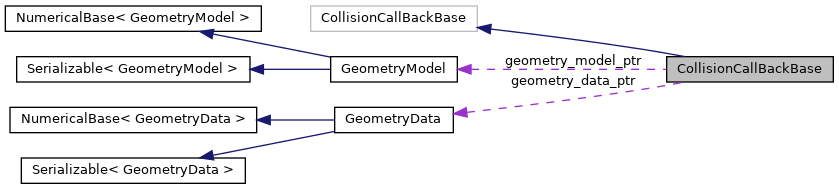
| GeometryData * | geometry_data_ptr |
| Geometry data associated to the callback. | |
| const GeometryModel * | geometry_model_ptr |
| Geometry model associated to the callback. | |
Interface for Pinocchio collision callback functors.
Definition at line 19 of file broadphase-callbacks.hpp.
|
inline |
Definition at line 21 of file broadphase-callbacks.hpp.
Callback method called after the termination of a collisition detection algorithm. The default implementation does nothing.
Reimplemented in CollisionCallBackDefault.
Definition at line 48 of file broadphase-callbacks.hpp.
|
inline |
Definition at line 37 of file broadphase-callbacks.hpp.
|
inline |
Definition at line 33 of file broadphase-callbacks.hpp.
|
inline |
Definition at line 29 of file broadphase-callbacks.hpp.
If true, the stopping criteria related to the collision callback has been met and one can stop.
Implemented in CollisionCallBackDefault.
| bool accumulate |
Whether the callback is used in an accumulate mode where several collide methods are called successively.
Definition at line 63 of file broadphase-callbacks.hpp.
| bool collision |
Whether there is a collision or not.
Definition at line 59 of file broadphase-callbacks.hpp.
|
protected |
Geometry data associated to the callback.
Definition at line 55 of file broadphase-callbacks.hpp.
|
protected |
Geometry model associated to the callback.
Definition at line 52 of file broadphase-callbacks.hpp.