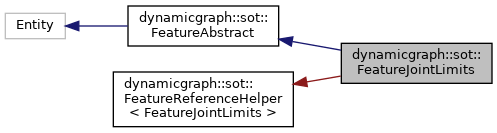
Class that defines gradient vector for jl avoidance.
More...
#include <sot/core/feature-joint-limits.hh>
|
| dynamicgraph::SignalPtr< dynamicgraph::Vector, int > | jointSIN |
| |
| dynamicgraph::SignalPtr< dynamicgraph::Vector, int > | upperJlSIN |
| |
| dynamicgraph::SignalPtr< dynamicgraph::Vector, int > | lowerJlSIN |
| |
| dynamicgraph::SignalTimeDependent< dynamicgraph::Vector, int > | widthJlSINTERN |
| |
| SignalPtr< Flags, int > | selectionSIN |
| | This vector specifies which dimension are used to perform the computation. For instance let us assume that the feature is a 3D point. If only the Y-axis should be used for computing error, activation and Jacobian, then the vector to specify is \( [ 0 1 0] \). More...
|
| |
| SignalTimeDependent< dynamicgraph::Vector, int > | errorSOUT |
| | This signal returns the error between the desired value and the current value : \( E(t) = {\bf s}(t) - {\bf s}^*(t)\). More...
|
| |
| SignalTimeDependent< dynamicgraph::Matrix, int > | jacobianSOUT |
| | Jacobian of the error wrt the robot state: \( J = \frac{\partial {\bf s}}{\partial {\bf q}}\). More...
|
| |
| SignalPtr< Flags, int > | selectionSIN |
| | This vector specifies which dimension are used to perform the computation. For instance let us assume that the feature is a 3D point. If only the Y-axis should be used for computing error, activation and Jacobian, then the vector to specify is \( [ 0 1 0] \). More...
|
| |
| SignalPtr< dynamicgraph::Vector, int > | errordotSIN |
| | Derivative of the reference value. More...
|
| |
| SignalTimeDependent< dynamicgraph::Vector, int > | errorSOUT |
| | This signal returns the error between the desired value and the current value : \( E(t) = {\bf s}(t) - {\bf s}^*(t)\). More...
|
| |
| SignalTimeDependent< dynamicgraph::Vector, int > | errordotSOUT |
| | Derivative of the error with respect to time: \( \frac{\partial e}{\partial t} = - \frac{d{\bf s}^*}{dt} \). More...
|
| |
| SignalTimeDependent< dynamicgraph::Matrix, int > | jacobianSOUT |
| | Jacobian of the error wrt the robot state: \( J = \frac{\partial {\bf s}}{\partial {\bf q}}\). More...
|
| |
| SignalTimeDependent< unsigned int, int > | dimensionSOUT |
| | Returns the dimension of the feature as an output signal. More...
|
| |
Class that defines gradient vector for jl avoidance.
◆ FeatureJointLimits()
| dynamicgraph::sot::FeatureJointLimits::FeatureJointLimits |
( |
const std::string & |
name | ) |
|
◆ ~FeatureJointLimits()
| virtual dynamicgraph::sot::FeatureJointLimits::~FeatureJointLimits |
( |
void |
| ) |
|
|
inlinevirtual |
◆ computeError()
| virtual dynamicgraph::Vector& dynamicgraph::sot::FeatureJointLimits::computeError |
( |
dynamicgraph::Vector & |
res, |
|
|
int |
time |
|
) |
| |
|
virtual |
Compute the error between the desired feature and the current value of the feature measured or deduced from the robot state.
- [out] res: The error will be set into res.
- [in] time: The time at which the error is computed.
- Returns
- The vector res with the appropriate value.
Implements dynamicgraph::sot::FeatureAbstract.
◆ computeJacobian()
| virtual dynamicgraph::Matrix& dynamicgraph::sot::FeatureJointLimits::computeJacobian |
( |
dynamicgraph::Matrix & |
res, |
|
|
int |
time |
|
) |
| |
|
virtual |
Compute the Jacobian of the error according the robot state.
- [out] res: The matrix in which the error will be written.
- Returns
- The matrix res with the appropriate values.
Implements dynamicgraph::sot::FeatureAbstract.
◆ computeWidthJl()
| dynamicgraph::Vector& dynamicgraph::sot::FeatureJointLimits::computeWidthJl |
( |
dynamicgraph::Vector & |
res, |
|
|
const int & |
time |
|
) |
| |
◆ DECLARE_REFERENCE_FUNCTIONS()
◆ display()
| virtual void dynamicgraph::sot::FeatureJointLimits::display |
( |
std::ostream & |
os | ) |
const |
|
virtual |
◆ getClassName()
| virtual const std::string& dynamicgraph::sot::FeatureJointLimits::getClassName |
( |
void |
| ) |
const |
|
inlinevirtual |
◆ getDimension()
| virtual unsigned int& dynamicgraph::sot::FeatureJointLimits::getDimension |
( |
unsigned int & |
res, |
|
|
int |
time |
|
) |
| |
|
virtual |
Verbose method.
- res: The integer in which the dimension will be return.
- time: The time at which the feature should be considered.
- Returns
- Dimension of the feature.
- Note
- Be careful with features changing their dimension according to time.
Implements dynamicgraph::sot::FeatureAbstract.
◆ selectActuated()
| static Flags dynamicgraph::sot::FeatureJointLimits::selectActuated |
( |
void |
| ) |
|
|
inlinestatic |
Static Feature selection.
◆ CLASS_NAME
| const std::string dynamicgraph::sot::FeatureJointLimits::CLASS_NAME |
|
static |
◆ errorSOUT
| SignalTimeDependent<dynamicgraph::Vector, int> dynamicgraph::sot::FeatureAbstract::errorSOUT |
This signal returns the error between the desired value and the current value : \( E(t) = {\bf s}(t) - {\bf s}^*(t)\).
◆ jacobianSOUT
| SignalTimeDependent<dynamicgraph::Matrix, int> dynamicgraph::sot::FeatureAbstract::jacobianSOUT |
Jacobian of the error wrt the robot state: \( J = \frac{\partial {\bf s}}{\partial {\bf q}}\).
◆ jointSIN
| dynamicgraph::SignalPtr<dynamicgraph::Vector, int> dynamicgraph::sot::FeatureJointLimits::jointSIN |
◆ lowerJlSIN
| dynamicgraph::SignalPtr<dynamicgraph::Vector, int> dynamicgraph::sot::FeatureJointLimits::lowerJlSIN |
◆ selectionSIN
| SignalPtr<Flags, int> dynamicgraph::sot::FeatureAbstract::selectionSIN |
This vector specifies which dimension are used to perform the computation. For instance let us assume that the feature is a 3D point. If only the Y-axis should be used for computing error, activation and Jacobian, then the vector to specify is \( [ 0 1 0] \).
◆ threshold
| double dynamicgraph::sot::FeatureJointLimits::threshold |
|
protected |
◆ THRESHOLD_DEFAULT
| const double dynamicgraph::sot::FeatureJointLimits::THRESHOLD_DEFAULT |
|
staticprotected |
◆ upperJlSIN
| dynamicgraph::SignalPtr<dynamicgraph::Vector, int> dynamicgraph::sot::FeatureJointLimits::upperJlSIN |
◆ widthJlSINTERN
| dynamicgraph::SignalTimeDependent<dynamicgraph::Vector, int> dynamicgraph::sot::FeatureJointLimits::widthJlSINTERN |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from dynamicgraph::sot::FeatureAbstract
Public Member Functions inherited from dynamicgraph::sot::FeatureAbstract