#include <sot-talos-controller.hh>
|
| boost::shared_ptr< dynamicgraph::Interpreter > | interpreter_ |
| | Embedded python interpreter accessible via Corba/ros. More...
|
| |
| boost::shared_ptr< ros::NodeHandle > | nh_ |
| |
| boost::shared_ptr< ros::AsyncSpinner > | spinner_ |
| |
◆ SoTTalosController() [1/3]
| SoTTalosController::SoTTalosController |
( |
| ) |
|
◆ SoTTalosController() [2/3]
| SoTTalosController::SoTTalosController |
( |
const char |
robotName[] | ) |
|
◆ SoTTalosController() [3/3]
| SoTTalosController::SoTTalosController |
( |
std::string |
robotName | ) |
|
◆ ~SoTTalosController()
| SoTTalosController::~SoTTalosController |
( |
| ) |
|
|
virtual |
◆ cleanupSetSensors()
| void SoTTalosController::cleanupSetSensors |
( |
std::map< std::string, dgsot::SensorValues > & |
sensorsIn | ) |
|
◆ getControl()
| void SoTTalosController::getControl |
( |
std::map< std::string, dgsot::ControlValues > & |
anglesOut | ) |
|
◆ init()
| void SoTTalosController::init |
( |
| ) |
|
|
protected |
◆ nominalSetSensors()
| void SoTTalosController::nominalSetSensors |
( |
std::map< std::string, dgsot::SensorValues > & |
sensorsIn | ) |
|
◆ runPython()
| void SoTTalosController::runPython |
( |
std::ostream & |
file, |
|
|
const std::string & |
command, |
|
|
dynamicgraph::Interpreter & |
interpreter |
|
) |
| |
|
protected |
◆ setNoIntegration()
| void SoTTalosController::setNoIntegration |
( |
void |
| ) |
|
◆ setSecondOrderIntegration()
| void SoTTalosController::setSecondOrderIntegration |
( |
void |
| ) |
|
◆ setupSetSensors()
| void SoTTalosController::setupSetSensors |
( |
std::map< std::string, dgsot::SensorValues > & |
sensorsIn | ) |
|
◆ startupPython()
| void SoTTalosController::startupPython |
( |
| ) |
|
|
protectedvirtual |
◆ updateRobotState()
| void SoTTalosController::updateRobotState |
( |
std::vector< double > & |
anglesIn | ) |
|
|
protected |
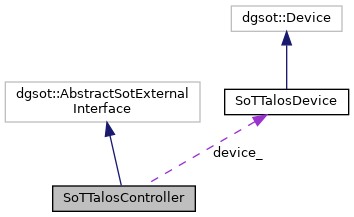
◆ device_
◆ interpreter_
| boost::shared_ptr<dynamicgraph::Interpreter> SoTTalosController::interpreter_ |
Embedded python interpreter accessible via Corba/ros.
◆ LOG_PYTHON
| const std::string SoTTalosController::LOG_PYTHON |
|
static |
Initial value:=
"/tmp/TalosController_python.out"
◆ nh_
| boost::shared_ptr<ros::NodeHandle> SoTTalosController::nh_ |
◆ spinner_
| boost::shared_ptr<ros::AsyncSpinner> SoTTalosController::spinner_ |
The documentation for this class was generated from the following files: