solver-HQP-factory.cpp File Reference
#include <tsid/solvers/solver-HQP-factory.hpp>#include <tsid/solvers/solver-HQP-eiquadprog.hpp>#include <tsid/solvers/solver-HQP-eiquadprog-fast.hpp>
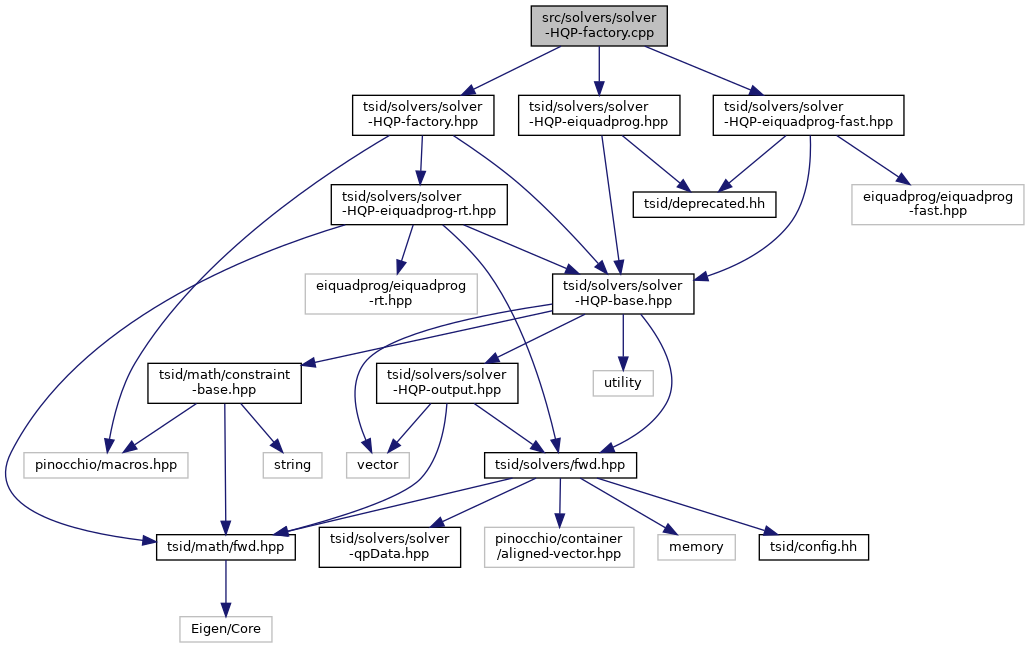
Include dependency graph for solver-HQP-factory.cpp:
Namespaces | |
| tsid | |
| tsid::solvers | |