#include <vector>#include <list>#include <map>#include <Eigen/Core>#include <hpp/util/pointer.hh>#include <hpp/fcl/fwd.hh>#include <hpp/fcl/math/matrix_3f.h>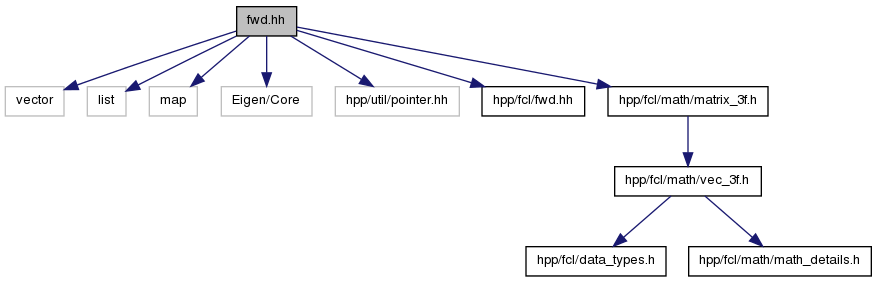
Namespaces | |
| namespace | hpp |
| namespace | hpp::model |
Typedefs | |
| typedef double | hpp::model::value_type |
| typedef Eigen::Matrix < value_type, Eigen::Dynamic, 1 > | hpp::model::vector_t |
| typedef vector_t | hpp::model::Configuration_t |
| typedef Eigen::Ref< const Configuration_t > | hpp::model::ConfigurationIn_t |
| typedef Eigen::Ref < Configuration_t > | hpp::model::ConfigurationOut_t |
| typedef boost::shared_ptr < Configuration_t > | hpp::model::ConfigurationPtr_t |
| typedef Eigen::Ref< const vector_t > | hpp::model::vectorIn_t |
| typedef Eigen::Ref< vector_t > | hpp::model::vectorOut_t |
| typedef Eigen::Matrix < value_type, Eigen::Dynamic, Eigen::Dynamic > | hpp::model::matrix_t |
| typedef Eigen::Ref< matrix_t > | hpp::model::matrixOut_t |
| typedef matrix_t::Index | hpp::model::size_type |
| typedef fcl::Matrix3f | hpp::model::matrix3_t |
| typedef fcl::Vec3f | hpp::model::vector3_t |
| typedef Eigen::Matrix < value_type, 6, Eigen::Dynamic > | hpp::model::JointJacobian_t |
| typedef Eigen::Matrix < value_type, 3, Eigen::Dynamic > | hpp::model::ComJacobian_t |
| typedef Eigen::Block < JointJacobian_t, 3, Eigen::Dynamic > | hpp::model::HalfJointJacobian_t |
| typedef Body * | hpp::model::BodyPtr_t |
| typedef std::vector< Body * > | hpp::model::BodyVector_t |
| typedef boost::shared_ptr < CollisionObject > | hpp::model::CollisionObjectPtr_t |
| typedef std::list < CollisionObjectPtr_t > | hpp::model::ObjectVector_t |
| typedef boost::shared_ptr< Device > | hpp::model::DevicePtr_t |
| typedef boost::shared_ptr < const Device > | hpp::model::DeviceConstPtr_t |
| typedef std::vector < DistanceResult > | hpp::model::DistanceResults_t |
| typedef boost::shared_ptr < HumanoidRobot > | hpp::model::HumanoidRobotPtr_t |
| typedef Joint * | hpp::model::JointPtr_t |
| typedef JointAnchor * | hpp::model::JointAnchorPtr_t |
| typedef JointRotation * | hpp::model::JointRotationPtr_t |
| typedef JointSO3 * | hpp::model::JointSO3Ptr_t |
| typedef JointTranslation< 1 > * | hpp::model::JointTranslationPtr_t |
| typedef JointTranslation< 2 > * | hpp::model::JointTranslation2Ptr_t |
| typedef JointTranslation< 3 > * | hpp::model::JointTranslation3Ptr_t |
| typedef const Joint * | hpp::model::JointConstPtr_t |
| typedef const JointAnchor * | hpp::model::JointAnchorConstPtr_t |
| typedef const JointRotation * | hpp::model::JointRotationConstPtr_t |
| typedef const JointSO3 * | hpp::model::JointSO3ConstPtr_t |
| typedef const JointTranslation< 1 > * | hpp::model::JointTranslationConstPtr_t |
| typedef const JointTranslation< 2 > * | hpp::model::JointTranslation2ConstPtr_t |
| typedef const JointTranslation< 3 > * | hpp::model::JointTranslation3ConstPtr_t |
| typedef std::map< std::string, JointPtr_t > | hpp::model::JointByName_t |
| typedef std::vector< JointPtr_t > | hpp::model::JointVector_t |
| typedef boost::shared_ptr < Gripper > | hpp::model::GripperPtr_t |
| typedef std::vector< GripperPtr_t > | hpp::model::Grippers_t |
| typedef fcl::Transform3f | hpp::model::Transform3f |
| typedef boost::shared_ptr < CenterOfMassComputation > | hpp::model::CenterOfMassComputationPtr_t |
Enumerations | |
| enum | hpp::model::Request_t { hpp::model::COLLISION, hpp::model::DISTANCE } |
Functions | |
| hpp::model::HPP_PREDEF_CLASS (Body) | |
| hpp::model::HPP_PREDEF_CLASS (ChildrenIterator) | |
| hpp::model::HPP_PREDEF_CLASS (CollisionObject) | |
| hpp::model::HPP_PREDEF_CLASS (Device) | |
| hpp::model::HPP_PREDEF_CLASS (DistanceResult) | |
| hpp::model::HPP_PREDEF_CLASS (HumanoidRobot) | |
| hpp::model::HPP_PREDEF_CLASS (Joint) | |
| hpp::model::HPP_PREDEF_CLASS (JointAnchor) | |
| hpp::model::HPP_PREDEF_CLASS (JointRotation) | |
| hpp::model::HPP_PREDEF_CLASS (JointSO3) | |
| hpp::model::HPP_PREDEF_CLASS (JointConfiguration) | |
| hpp::model::HPP_PREDEF_CLASS (ObjectFactory) | |
| hpp::model::HPP_PREDEF_CLASS (ObjectIterator) | |
| hpp::model::HPP_PREDEF_CLASS (Gripper) | |
| hpp::model::HPP_PREDEF_CLASS (CenterOfMassComputation) | |

