#include <hpp/core/path.hh>
Public Member Functions | |
Construction, destruction, copy | |
| virtual | ~Path () |
| Destructor. More... | |
| virtual PathPtr_t | copy () const =0 |
| Return a shared pointer to a copy of this. More... | |
| virtual PathPtr_t | copy (const ConstraintSetPtr_t &constraints) const =0 |
| template<class T > | |
| boost::shared_ptr< T > | as (void) |
| Static cast into a derived type. More... | |
| template<class T > | |
| boost::shared_ptr< const T > | as (void) const |
| Static cast into a derived type. More... | |
Extraction/Reversion of a sub-path | |
| PathPtr_t | extract (const interval_t &subInterval) const |
| PathPtr_t | extract (const value_type &tmin, const value_type &tmax) const |
| virtual PathPtr_t | reverse () const |
Evalutation of the path | |
| Configuration_t | operator() (const value_type &time) const HPP_CORE_DEPRECATED |
| Configuration_t | operator() (const value_type &time, bool &success) const |
| bool | operator() (ConfigurationOut_t result, const value_type &time) const |
| Configuration_t | eval (const value_type &time, bool &success) const |
| bool | eval (ConfigurationOut_t result, const value_type &time) const |
| bool | at (const value_type &time, ConfigurationOut_t result) const |
| Get the configuration at a parameter without applying the constraints. More... | |
| void | derivative (vectorOut_t result, const value_type &time, size_type order) const |
| void | velocityBound (vectorOut_t result, const value_type &t0, const value_type &t1) const |
Path definition | |
| size_type | outputSize () const |
| Get size of configuration space. More... | |
| size_type | outputDerivativeSize () const |
| Get size of velocity. More... | |
| const interval_t & | timeRange () const |
| Get interval of definition. More... | |
| virtual value_type | length () const |
| Get length of definition interval. More... | |
| virtual Configuration_t | initial () const =0 |
| Get the initial configuration. More... | |
| virtual Configuration_t | end () const =0 |
| Get the final configuration. More... | |
| const ConstraintSetPtr_t & | constraints () const |
| Get constraints the path is subject to. More... | |
Time parameterizarion | |
Time parameterization is handled by this class so child classes need not to handle it. | |
| const interval_t & | paramRange () const |
| void | timeParameterization (const TimeParameterizationPtr_t &tp, const interval_t &tr) |
| Set the time parameterization function. More... | |
Protected Member Functions | |
| virtual std::ostream & | print (std::ostream &os) const |
| Path (const interval_t &interval, size_type outputSize, size_type outputDerivativeSize, const ConstraintSetPtr_t &constraints) | |
| Path (const interval_t &interval, size_type outputSize, size_type outputDerivativeSize) | |
| Path (const Path &path) | |
| Copy constructor. More... | |
| Path (const Path &path, const ConstraintSetPtr_t &constraints) | |
| Copy constructor with constraints. More... | |
| void | init (const PathWkPtr_t &self) |
| void | constraints (const ConstraintSetPtr_t &constraint) |
| virtual void | checkPath () const |
| Should be called by child classes after having init. More... | |
| void | timeRange (const interval_t &timeRange) |
| const TimeParameterizationPtr_t & | timeParameterization () const |
| value_type | paramLength () const |
| Configuration_t | configAtParam (const value_type ¶m, bool &success) const |
| virtual bool | impl_compute (ConfigurationOut_t configuration, value_type param) const =0 |
| Function evaluation without applying constraints. More... | |
| virtual void | impl_derivative (vectorOut_t derivative, const value_type ¶m, size_type order) const |
| virtual void | impl_velocityBound (vectorOut_t bound, const value_type ¶m0, const value_type ¶m1) const |
| virtual PathPtr_t | impl_extract (const interval_t ¶mInterval) const |
| Virtual implementation of extract. More... | |
Protected Attributes | |
| interval_t | paramRange_ |
| Interval of parameters. More... | |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const Path &path) |
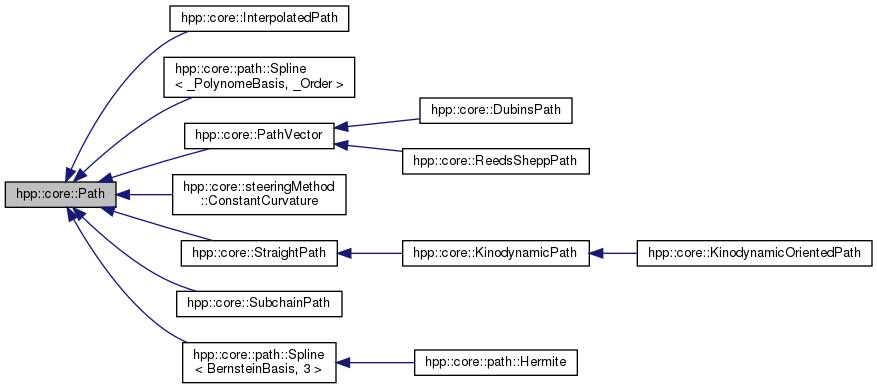
Detailed Description
Abstraction of paths: mapping from time to configuration space
A path \( p \) is defined by:
\begin{eqnarray*} p : [t_0, t_1] &\to & \mathcal{C} \\ t &\mapsto & constraints.apply( q(t) ) \end{eqnarray*}
where
- \( [t_0, t_1] \) is given by timeRange
- \( q(t) \) is the child class implementation of impl_compute
constraints.applycorresponds to calling Constraint::apply to constraints
Optionally, it is possible to time-parameterize the path with a function \( s \). By default, \( s \) is the identity. The model becomes:
\begin{eqnarray*} p : [t_0, t_1] &\to & \mathcal{C} \\ t &\mapsto & constraints.apply( q(s(t)) ) \end{eqnarray*}
where \( s \) is the timeParameterization, from timeRange to paramRange.
Constructor & Destructor Documentation
◆ ~Path()
|
inlinevirtual |
Destructor.
◆ Path() [1/4]
|
protected |
Constructor
- Parameters
-
interval interval of definition of the path, outputSize size of the output configuration, outputDerivativeSize number of degrees of freedom of the underlying robot constraints constraints the set is subject to, constraints are solved at each evaluation of the output configuration.
- Note
- Constraints are copied.
◆ Path() [2/4]
|
protected |
Constructor
- Parameters
-
interval interval of definition of the path, outputSize size of the output configuration, outputDerivativeSize number of degrees of freedom of the underlying robot
◆ Path() [3/4]
|
protected |
Copy constructor.
◆ Path() [4/4]
|
protected |
Copy constructor with constraints.
Member Function Documentation
◆ as() [1/2]
|
inline |
Static cast into a derived type.
◆ as() [2/2]
|
inline |
Static cast into a derived type.
◆ at()
|
inline |
Get the configuration at a parameter without applying the constraints.
◆ checkPath()
|
protectedvirtual |
Should be called by child classes after having init.
◆ configAtParam()
|
inlineprotected |
◆ constraints() [1/2]
|
inline |
Get constraints the path is subject to.
◆ constraints() [2/2]
|
inlineprotected |
Set the constraints
- Warning
- this method is protected for child classes that need to initialize themselves before being sure that the initial and end configuration satisfy the constraints
◆ copy() [1/2]
|
pure virtual |
Return a shared pointer to a copy of this.
Implemented in hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::StraightPath, hpp::core::InterpolatedPath, hpp::core::KinodynamicPath, hpp::core::DubinsPath, hpp::core::KinodynamicOrientedPath, hpp::core::ReedsSheppPath, hpp::core::path::Hermite, hpp::core::PathVector, hpp::core::steeringMethod::ConstantCurvature, and hpp::core::SubchainPath.
◆ copy() [2/2]
|
pure virtual |
Return a shared pointer to a copy of this and set constraints
- Parameters
-
constraints constraints to apply to the copy
- Precondition
- *this should not have constraints.
Implemented in hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::StraightPath, hpp::core::InterpolatedPath, hpp::core::KinodynamicPath, hpp::core::DubinsPath, hpp::core::KinodynamicOrientedPath, hpp::core::ReedsSheppPath, hpp::core::path::Hermite, hpp::core::PathVector, hpp::core::steeringMethod::ConstantCurvature, and hpp::core::SubchainPath.
◆ derivative()
| void hpp::core::Path::derivative | ( | vectorOut_t | result, |
| const value_type & | time, | ||
| size_type | order | ||
| ) | const |
Get derivative with respect to parameter at given parameter
- Parameters
-
time value of the time in the definition interval, order order of the derivative
- Return values
-
result derivative. Should be allocated and of correct size.
- Warning
- the method is not implemented in this class and throws if called without being implemented in the derived class.
- Note
- unless otherwise stated, this method is not compatible with constraints. The derivative of the non-constrained path will be computed.
◆ end()
|
pure virtual |
Get the final configuration.
Implemented in hpp::core::StraightPath, hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::InterpolatedPath, hpp::core::DubinsPath, hpp::core::ReedsSheppPath, hpp::core::PathVector, hpp::core::path::Hermite, hpp::core::SubchainPath, and hpp::core::steeringMethod::ConstantCurvature.
◆ eval() [1/2]
|
inline |
◆ eval() [2/2]
|
inline |
◆ extract() [1/2]
| PathPtr_t hpp::core::Path::extract | ( | const interval_t & | subInterval | ) | const |
- Parameters
-
subInterval interval of definition of the extract path If upper bound of subInterval is smaller than lower bound, result is reversed.
- Exceptions
-
projection_error is thrown when an end configuration of the returned path could not be computed due to projection failure.
◆ extract() [2/2]
|
inline |
- Parameters
-
subInterval interval of definition of the extract path If upper bound of subInterval is smaller than lower bound, result is reversed.
- Exceptions
-
projection_error is thrown when an end configuration of the returned path could not be computed due to projection failure.
◆ impl_compute()
|
protectedpure virtual |
Function evaluation without applying constraints.
- Returns
- true if everything went good.
Implemented in hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::StraightPath, hpp::core::InterpolatedPath, hpp::core::PathVector, hpp::core::KinodynamicPath, hpp::core::KinodynamicOrientedPath, hpp::core::steeringMethod::ConstantCurvature, and hpp::core::SubchainPath.
◆ impl_derivative()
|
inlineprotectedvirtual |
Virtual implementation of derivative
- Parameters
-
param parameter within paramRange order order of derivation.
- Return values
-
derivative
Reimplemented in hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::StraightPath, hpp::core::InterpolatedPath, hpp::core::PathVector, hpp::core::ReedsSheppPath, and hpp::core::steeringMethod::ConstantCurvature.
◆ impl_extract()
|
protectedvirtual |
Virtual implementation of extract.
Reimplemented in hpp::core::StraightPath, hpp::core::InterpolatedPath, hpp::core::PathVector, hpp::core::KinodynamicOrientedPath, hpp::core::steeringMethod::ConstantCurvature, and hpp::core::KinodynamicPath.
◆ impl_velocityBound()
|
inlineprotectedvirtual |
Virtual implementation of velocityBound
- Parameters
-
param0,param1 interval of parameter
- Return values
-
bound
Reimplemented in hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::StraightPath, hpp::core::InterpolatedPath, and hpp::core::steeringMethod::ConstantCurvature.
◆ init()
|
protected |
Store weak pointer to itself
should be called at construction of derived class instances
◆ initial()
|
pure virtual |
Get the initial configuration.
Implemented in hpp::core::StraightPath, hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::InterpolatedPath, hpp::core::DubinsPath, hpp::core::ReedsSheppPath, hpp::core::PathVector, hpp::core::path::Hermite, hpp::core::SubchainPath, and hpp::core::steeringMethod::ConstantCurvature.
◆ length()
|
inlinevirtual |
Get length of definition interval.
◆ operator()() [1/3]
|
inline |
- Deprecated:
- Use operator()(value_type, bool)
◆ operator()() [2/3]
|
inline |
◆ operator()() [3/3]
|
inline |
◆ outputDerivativeSize()
|
inline |
Get size of velocity.
◆ outputSize()
|
inline |
Get size of configuration space.
◆ paramLength()
|
inlineprotected |
◆ paramRange()
|
inline |
Get interval of parameters.
- Returns
- the result of applying the timeParameterization to timeRange().
- Note
- The time parameterization defaults to identity.
◆ print()
|
protectedvirtual |
Print interval of definition (and of parameters if relevant) in a stream
Reimplemented in hpp::core::path::Spline< _PolynomeBasis, _Order >, hpp::core::path::Spline< BernsteinBasis, 3 >, hpp::core::StraightPath, hpp::core::InterpolatedPath, hpp::core::KinodynamicPath, hpp::core::DubinsPath, hpp::core::PathVector, hpp::core::path::Hermite, hpp::core::ReedsSheppPath, hpp::core::KinodynamicOrientedPath, hpp::core::SubchainPath, and hpp::core::steeringMethod::ConstantCurvature.
◆ reverse()
|
virtual |
Reversion of a path
- Returns
- a new path that is this one reversed.
Reimplemented in hpp::core::InterpolatedPath.
◆ timeParameterization() [1/2]
|
inline |
Set the time parameterization function.
◆ timeParameterization() [2/2]
|
inlineprotected |
◆ timeRange() [1/2]
|
inline |
Get interval of definition.
◆ timeRange() [2/2]
|
inlineprotected |
◆ velocityBound()
|
inline |
Get an upper bound of the velocity on a sub-interval. The result is a coefficient-wise.
- Parameters
-
t0 begin of the interval t1 end of the interval
- Return values
-
result maximal derivative on the sub-interval. Should be allocated and of correct size.
- Warning
- the method is not implemented in this class and throws if called without being implemented in the derived class.
- Note
- unless otherwise stated, this method is not compatible with constraints. The derivative of the non-constrained path will be computed.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Member Data Documentation
◆ paramRange_
|
protected |
Interval of parameters.
The documentation for this class was generated from the following file:
- include/hpp/core/path.hh
