#include <hpp/pinocchio/gripper.hh>
Public Member Functions | |
| const JointPtr_t & | joint () const |
| Get joint to which the gripper is attached. More... | |
| const FrameIndex & | frameId () const |
| Get the frame Id of the gripper in the vector of frame of the Model. More... | |
| const Transform3f & | objectPositionInJoint () const |
| Get handle position in the the Grippering joint. More... | |
| const std::string & | name () const |
| get name More... | |
| value_type | clearance () const |
| void | clearance (const value_type &clearance) |
| GripperPtr_t | clone () const |
| std::ostream & | print (std::ostream &os) const |
Static Public Member Functions | |
| static GripperPtr_t | create (const std::string &name, const DeviceWkPtr_t &device) |
| static GripperPtr_t | createCopy (const GripperPtr_t &gripper, const DeviceWkPtr_t &otherDevice) |
Protected Member Functions | |
| Gripper (const std::string &name, const DeviceWkPtr_t &device) | |
| void | init (GripperWkPtr_t weakPtr) |
Detailed Description
Definition of a robot gripper
This class represent a robot gripper as a frame attached to the joint of the robot that holds the gripper.
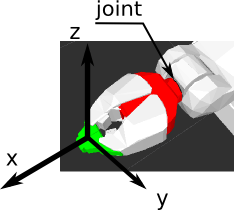
To graps a box-shaped object with small lengths along x and y, the gripper frame should coincide with the object frame.
Constructor & Destructor Documentation
◆ Gripper()
|
protected |
Constructor
- Parameters
-
name of the gripper in the device, device
- Todo:
- device should be of type DeviceConstPtr_t but the constructor of JointPtr_t needs a DevicePtr_t.
Member Function Documentation
◆ clearance() [1/2]
|
inline |
Get the clearance
The clearance is a distance, from the center of the gripper and along the x-aixs, that "ensures" an object being at that distance is not colliding with this gripper. It also gives an order of magnitude of the size of the gripper.
◆ clearance() [2/2]
|
inline |
Set the clearance
- See also
- clearance()
◆ clone()
| GripperPtr_t hpp::pinocchio::Gripper::clone | ( | ) | const |
◆ create()
|
inlinestatic |
Return a shared pointer to new instance
- Parameters
-
name of the gripper in the device, device
◆ createCopy()
|
inlinestatic |
◆ frameId()
|
inline |
Get the frame Id of the gripper in the vector of frame of the Model.
◆ init()
|
inlineprotected |
◆ joint()
|
inline |
Get joint to which the gripper is attached.
◆ name()
|
inline |
get name
◆ objectPositionInJoint()
| const Transform3f& hpp::pinocchio::Gripper::objectPositionInJoint | ( | ) | const |
Get handle position in the the Grippering joint.
◆ print()
| std::ostream& hpp::pinocchio::Gripper::print | ( | std::ostream & | os | ) | const |
The documentation for this class was generated from the following file:
- include/hpp/pinocchio/gripper.hh
