configuration.hh File Reference
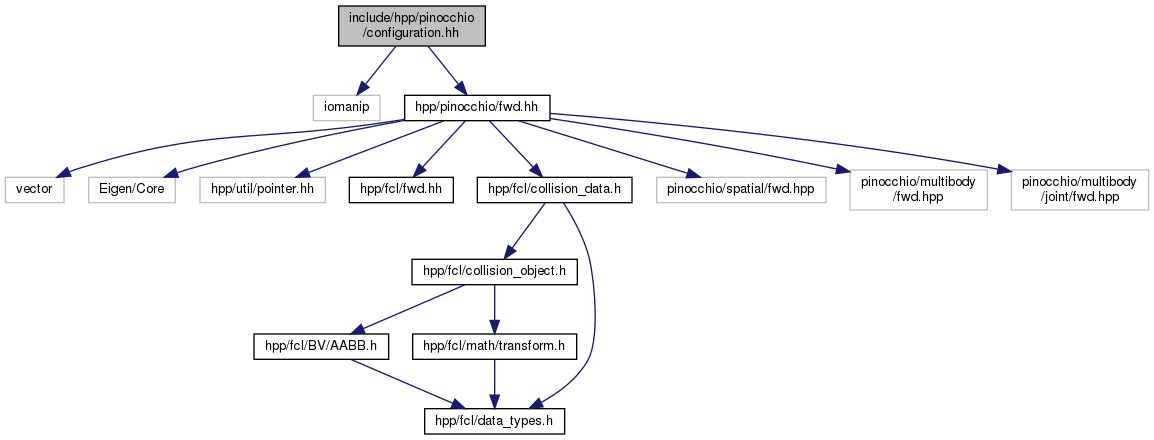
Include dependency graph for configuration.hh:
Go to the source code of this file.
Namespaces | |
| hpp | |
| Utility functions. | |
| hpp::pinocchio | |
Functions | |
| void | hpp::pinocchio::saturate (const DevicePtr_t &robot, ConfigurationOut_t configuration) |
| bool | hpp::pinocchio::saturate (const DevicePtr_t &robot, ConfigurationOut_t configuration, ArrayXb &saturation) |
| template<bool saturateConfig, typename LieGroup > | |
| void | hpp::pinocchio::integrate (const DevicePtr_t &robot, ConfigurationIn_t configuration, vectorIn_t velocity, ConfigurationOut_t result) |
| template<typename LieGroup > | |
| void | hpp::pinocchio::interpolate (const DevicePtr_t &robot, ConfigurationIn_t q0, ConfigurationIn_t q1, const value_type &u, ConfigurationOut_t result) |
| template<typename LieGroup > | |
| void | hpp::pinocchio::difference (const DevicePtr_t &robot, ConfigurationIn_t q1, ConfigurationIn_t q2, vectorOut_t result) |
| bool | hpp::pinocchio::isApprox (const DevicePtr_t &robot, ConfigurationIn_t q1, ConfigurationIn_t q2, value_type eps) |
| value_type | hpp::pinocchio::distance (const DevicePtr_t &robot, ConfigurationIn_t q1, ConfigurationIn_t q2) |
| void | hpp::pinocchio::normalize (const DevicePtr_t &robot, Configuration_t &q) |
| void | hpp::pinocchio::normalize (const DevicePtr_t &robot, ConfigurationOut_t q) |
| bool | hpp::pinocchio::isNormalized (const DevicePtr_t &robot, ConfigurationIn_t q, const value_type &eps) |
| std::string | hpp::pinocchio::displayConfig (ConfigurationIn_t q, int precision=20) |
| Write configuration in a string. More... | |
| std::ostream & | hpp::pinocchio::display (std::ostream &os, const SE3 &m) |
| Write a SE3 taking into account the indentation. More... | |
