device.hh File Reference
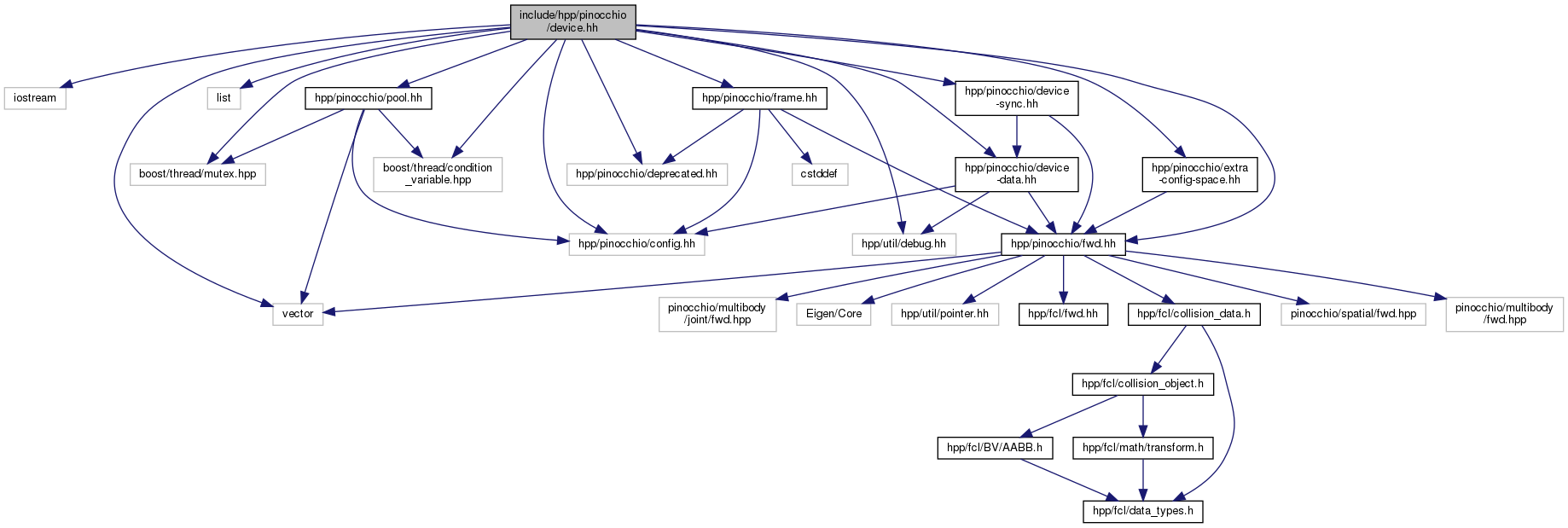
#include <iostream>#include <vector>#include <list>#include <boost/thread/mutex.hpp>#include <boost/thread/condition_variable.hpp>#include <hpp/util/debug.hh>#include <hpp/pinocchio/fwd.hh>#include <hpp/pinocchio/frame.hh>#include <hpp/pinocchio/pool.hh>#include <hpp/pinocchio/config.hh>#include <hpp/pinocchio/deprecated.hh>#include <hpp/pinocchio/extra-config-space.hh>#include <hpp/pinocchio/device-data.hh>#include <hpp/pinocchio/device-sync.hh>
Include dependency graph for device.hh:
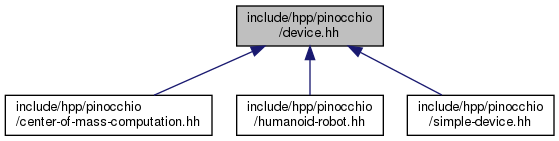
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hpp::pinocchio::Device |
| Robot with geometric and dynamic pinocchio. More... | |
| struct | hpp::pinocchio::Device::JointLinearConstraint |
Namespaces | |
| hpp | |
| Utility functions. | |
| hpp::pinocchio | |
Functions | |
| std::ostream & | hpp::pinocchio::operator<< (std::ostream &os, const hpp::pinocchio::Device &device) |
