|
| enum | { Options = _Options
} |
| |
|
typedef Eigen::Matrix< Scalar, 6, 10, Options > | BodyRegressorType |
| | The type of the body regressor.
|
| |
|
typedef VectorXs | ConfigVectorType |
| | Dense vectorized version of a joint configuration vector.
|
| |
|
typedef ForceTpl< Scalar, Options > | Force |
| |
|
typedef FrameTpl< Scalar, Options > | Frame |
| |
|
typedef pinocchio::FrameIndex | FrameIndex |
| |
|
typedef pinocchio::GeomIndex | GeomIndex |
| |
|
typedef pinocchio::Index | Index |
| |
|
typedef std::vector< Index > | IndexVector |
| |
|
typedef InertiaTpl< Scalar, Options > | Inertia |
| |
|
typedef JointCollectionTpl< Scalar, Options > | JointCollection |
| |
|
typedef JointDataTpl< Scalar, Options, JointCollectionTpl > | JointData |
| |
|
typedef pinocchio::JointIndex | JointIndex |
| |
|
typedef JointModelTpl< Scalar, Options, JointCollectionTpl > | JointModel |
| |
|
typedef Eigen::Matrix< Scalar, 3, Eigen::Dynamic, Options > | Matrix3x |
| | The 3d jacobian type (temporary)
|
| |
|
typedef Eigen::Matrix< Scalar, 6, 6, Options > | Matrix6 |
| |
|
typedef Eigen::Matrix< Scalar, 6, Eigen::Dynamic, Options > | Matrix6x |
| | The 6d jacobian type (temporary)
|
| |
|
typedef Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic, Options > | MatrixXs |
| |
|
typedef ModelTpl< Scalar, Options, JointCollectionTpl > | Model |
| |
|
typedef MotionTpl< Scalar, Options > | Motion |
| |
|
typedef Eigen::Matrix< Scalar, 6, 6, Eigen::RowMajor|Options > | RowMatrix6 |
| |
|
typedef Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor|Options > | RowMatrixXs |
| |
|
typedef _Scalar | Scalar |
| |
|
typedef SE3Tpl< Scalar, Options > | SE3 |
| |
|
typedef VectorXs | TangentVectorType |
| | Dense vectorized version of a joint tangent vector (e.g. velocity, acceleration, etc). It also handles the notion of co-tangent vector (e.g. torque, etc).
|
| |
| typedef Tensor< Scalar, 3, Options > | Tensor3x |
| | . More...
|
| |
|
typedef Eigen::Matrix< Scalar, 3, 1, Options > | Vector3 |
| |
|
typedef Eigen::Matrix< Scalar, Eigen::Dynamic, 1, Options > | VectorXs |
| |
|
| | DataTpl (const Model &model) |
| | Default constructor of pinocchio::Data from a pinocchio::Model. More...
|
| |
|
| DataTpl () |
| | Default constructor.
|
| |
|
typedef | PINOCCHIO_ALIGNED_STD_VECTOR (JointModel) JointModelVector |
| |
|
typedef | PINOCCHIO_ALIGNED_STD_VECTOR (JointData) JointDataVector |
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Motion) a |
| | Vector of joint accelerations expressed at the centers of the joints frames.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Motion) oa |
| | Vector of joint accelerations expressed at the origin of the world.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Motion) a_gf |
| | Vector of joint accelerations due to the gravity field.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Motion) oa_gf |
| | Vector of joint accelerations expressed at the origin of the world including gravity contribution.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Motion) v |
| | Vector of joint velocities expressed at the centers of the joints.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Motion) ov |
| | Vector of joint velocities expressed at the origin.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Force) f |
| | Vector of body forces expressed in the local frame of the joint. For each body, the force represents the sum of all external forces acting on the body.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Force) of |
| | Vector of body forces expressed in the world frame. For each body, the force represents the sum of all external forces acting on the body.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Force) h |
| | Vector of spatial momenta expressed in the local frame of the joint.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Force) oh |
| | Vector of spatial momenta expressed in the world frame.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (SE3) oMi |
| | Vector of absolute joint placements (wrt the world).
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (SE3) liMi |
| | Vector of relative joint placements (wrt the body parent).
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (SE3) oMf |
| | Vector of absolute operationnel frame placements (wrt the world).
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Inertia) Ycrb |
| | Vector of sub-tree composite rigid body inertias, i.e. the apparent inertia of the subtree supported by the joint and expressed in the local frame of the joint..
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Matrix6) dYcrb |
| | Vector of sub-tree composite rigid body inertia time derivatives \( \dot{Y}_{crb}\). See Data::Ycrb for more details.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Matrix6) vxI |
| | Right variation of the inertia matrix.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Matrix6) Ivx |
| | Left variation of the inertia matrix.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Inertia) oYcrb |
| | Inertia quantities expressed in the world frame.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Matrix6) doYcrb |
| | Time variation of the inertia quantities expressed in the world frame.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Matrix6) Yaba |
| | Inertia matrix of the subtree expressed as dense matrix [ABA].
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Matrix6x) Fcrb |
| | Spatial forces set, used in CRBA and CCRBA.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (SE3) iMf |
| | Vector of joint placements wrt to algorithm end effector.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Vector3) com |
| | Vector of subtree center of mass positions expressed in the root joint of the subtree. In other words, com[j] is the CoM position of the subtree supported by joint \( j \) and expressed in the joint frame \( j \). The element com[0] corresponds to the center of mass position of the whole model and expressed in the global frame.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Vector3) vcom |
| | Vector of subtree center of mass linear velocities expressed in the root joint of the subtree. In other words, vcom[j] is the CoM linear velocity of the subtree supported by joint \( j \) and expressed in the joint frame \( j \). The element vcom[0] corresponds to the velocity of the CoM of the whole model expressed in the global frame.
|
| |
|
| PINOCCHIO_ALIGNED_STD_VECTOR (Vector3) acom |
| | Vector of subtree center of mass linear accelerations expressed in the root joint of the subtree. In other words, acom[j] is the CoM linear acceleration of the subtree supported by joint \( j \) and expressed in the joint frame \( j \). The element acom[0] corresponds to the acceleration of the CoM of the whole model expressed in the global frame.
|
| |
|
void | loadFromBinary (const std::string &filename) |
| | Loads a Derived object from an binary file.
|
| |
|
void | loadFromString (const std::string &str) |
| | Loads a Derived object from a string.
|
| |
|
void | loadFromStringStream (std::istringstream &is) |
| | Loads a Derived object from a stream string.
|
| |
|
void | loadFromText (const std::string &filename) |
| | Loads a Derived object from a text file.
|
| |
|
void | loadFromXML (const std::string &filename, const std::string &tag_name) |
| | Loads a Derived object from an XML file.
|
| |
|
void | saveToBinary (const std::string &filename) const |
| | Saves a Derived object as an binary file.
|
| |
|
std::string | saveToString () const |
| | Saves a Derived object to a string.
|
| |
|
void | saveToStringStream (std::stringstream &ss) const |
| | Saves a Derived object to a string stream.
|
| |
|
void | saveToText (const std::string &filename) const |
| | Saves a Derived object as a text file.
|
| |
|
void | saveToXML (const std::string &filename, const std::string &tag_name) const |
| | Saves a Derived object as an XML file.
|
| |
|
| Matrix6x | Ag |
| | Centroidal Momentum Matrix. More...
|
| |
|
BodyRegressorType | bodyRegressor |
| | Body regressor.
|
| |
|
MatrixXs | C |
| | The Coriolis matrix (a square matrix of dim model.nv).
|
| |
|
VectorXs | D |
| | Diagonal of the joint space intertia matrix obtained by a Cholesky Decomposition.
|
| |
|
Matrix6x | dAdq |
| | Variation of the spatial acceleration set with respect to the joint configuration.
|
| |
|
Matrix6x | dAdv |
| | Variation of the spatial acceleration set with respect to the joint velocity.
|
| |
| Matrix6x | dAg |
| | Centroidal Momentum Matrix Time Variation. More...
|
| |
|
TangentVectorType | ddq |
| | The joint accelerations computed from ABA.
|
| |
|
MatrixXs | ddq_dq |
| | Partial derivative of the joint acceleration vector with respect to the joint configuration.
|
| |
|
MatrixXs | ddq_dv |
| | Partial derivative of the joint acceleration vector with respect to the joint velocity.
|
| |
|
Matrix6x | dFda |
| | Variation of the forceset with respect to the joint acceleration.
|
| |
|
Matrix6x | dFdq |
| | Variation of the forceset with respect to the joint configuration.
|
| |
|
Matrix6x | dFdv |
| | Variation of the forceset with respect to the joint velocity.
|
| |
|
Matrix6x | dHdq |
| | Variation of the spatial momenta with respect to the joint configuration.
|
| |
| Force | dhg |
| | Centroidal momentum time derivative. More...
|
| |
|
VectorXs | Dinv |
| | Diagonal inverse of the joint space intertia matrix obtained by a Cholesky Decomposition.
|
| |
|
Matrix6x | dJ |
| | Derivative of the Jacobian with respect to the time.
|
| |
|
TangentVectorType | dq_after |
| | Generalized velocity after impact.
|
| |
|
MatrixXs | dtau_dq |
| | Partial derivative of the joint torque vector with respect to the joint configuration.
|
| |
|
MatrixXs | dtau_dv |
| | Partial derivative of the joint torque vector with respect to the joint velocity.
|
| |
|
Matrix6x | dVdq |
| | Variation of the spatial velocity set with respect to the joint configuration.
|
| |
|
std::vector< int > | end_idx_v_fromRow |
| | End index of the Joint motion subspace.
|
| |
| VectorXs | g |
| | Vector of generalized gravity (dim model.nv). More...
|
| |
| Force | hg |
| | Centroidal momentum quantity. More...
|
| |
| Inertia | Ig |
| | Centroidal Composite Rigid Body Inertia. More...
|
| |
|
VectorXs | impulse_c |
| | Lagrange Multipliers corresponding to the contact impulses in pinocchio::impulseDynamics.
|
| |
|
Matrix6x | IS |
| | Used in computeMinverse.
|
| |
|
Matrix6 | Itmp |
| | Temporary for derivative algorithms.
|
| |
| Matrix6x | J |
| | Jacobian of joint placements. More...
|
| |
| Matrix3x | Jcom |
| | Jacobian of center of mass. More...
|
| |
|
MatrixXs | JMinvJt |
| | Inverse of the operational-space inertia matrix.
|
| |
|
JointDataVector | joints |
| | Vector of pinocchio::JointData associated to the pinocchio::JointModel stored in model, encapsulated in JointDataAccessor.
|
| |
|
MatrixXs | jointTorqueRegressor |
| | Matrix related to joint torque regressor.
|
| |
|
Tensor3x | kinematic_hessians |
| | Tensor containing the kinematic Hessian of all the joints.
|
| |
|
Scalar | kinetic_energy |
| | Kinetic energy of the model.
|
| |
|
VectorXs | lambda_c |
| | Lagrange Multipliers corresponding to the contact forces in pinocchio::forwardDynamics.
|
| |
|
std::vector< int > | lastChild |
| | Index of the last child (for CRBA)
|
| |
|
Eigen::LLT< MatrixXs > | llt_JMinvJt |
| | Cholesky decompostion of \(JMinvJt\).
|
| |
|
MatrixXs | M |
| | The joint space inertia matrix (a square matrix of dim model.nv).
|
| |
|
Matrix6 | M6tmp |
| | Temporary for derivative algorithms.
|
| |
|
RowMatrix6 | M6tmpR |
| |
|
RowMatrix6 | M6tmpR2 |
| |
|
std::vector< Scalar > | mass |
| | Vector of subtree mass. In other words, mass[j] is the mass of the subtree supported by joint \( j \). The element mass[0] corresponds to the total mass of the model.
|
| |
|
RowMatrixXs | Minv |
| | The inverse of the joint space inertia matrix (a square matrix of dim model.nv).
|
| |
| VectorXs | nle |
| | Vector of Non Linear Effects (dim model.nv). It corresponds to concatenation of the Coriolis, centrifugal and gravitational effects. More...
|
| |
|
std::vector< int > | nvSubtree |
| | Dimension of the subtree motion space (for CRBA)
|
| |
|
std::vector< int > | nvSubtree_fromRow |
| | Subtree of the current row index (used in Cholesky Decomposition).
|
| |
|
std::vector< int > | parents_fromRow |
| | First previous non-zero row in M (used in Cholesky Decomposition).
|
| |
|
Scalar | potential_energy |
| | Potential energy of the model.
|
| |
|
Matrix6x | SDinv |
| | Used in computeMinverse.
|
| |
|
MatrixXs | sDUiJt |
| | Temporary corresponding to \( \sqrt{D} U^{-1} J^{\top} \).
|
| |
|
std::vector< int > | start_idx_v_fromRow |
| | Starting index of the Joint motion subspace.
|
| |
|
Matrix3x | staticRegressor |
| | Matrix related to static regressor.
|
| |
|
std::vector< std::vector< int > > | supports_fromRow |
| | Each element of this vector corresponds to the ordered list of indexes belonging to the supporting tree of the given index at the row level. It may be helpful to retrieve the sparsity pattern through it.
|
| |
|
TangentVectorType | tau |
| | Vector of joint torques (dim model.nv).
|
| |
|
VectorXs | tmp |
| | Temporary of size NV used in Cholesky Decomposition.
|
| |
|
VectorXs | torque_residual |
| | Temporary corresponding to the residual torque \( \tau - b(q,\dot{q}) \).
|
| |
|
TangentVectorType | u |
| | Intermediate quantity corresponding to apparent torque [ABA].
|
| |
|
MatrixXs | U |
| | Joint space intertia matrix square root (upper trianglular part) computed with a Cholesky Decomposition.
|
| |
|
Matrix6x | UDinv |
| | Used in computeMinverse.
|
| |
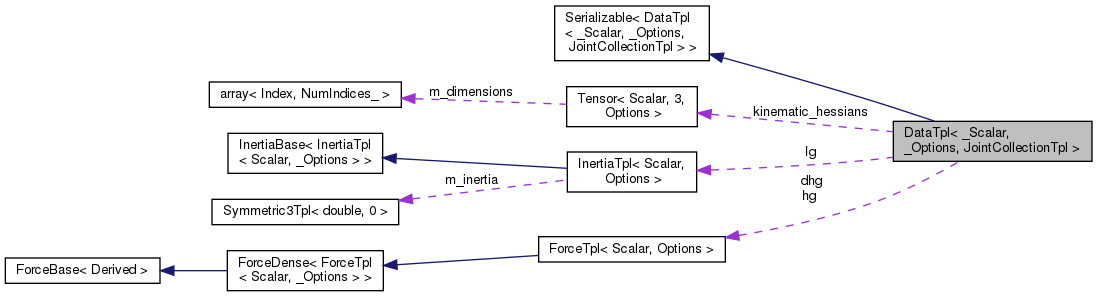
template<typename _Scalar, int _Options, template< typename, int > class JointCollectionTpl>
struct pinocchio::DataTpl< _Scalar, _Options, JointCollectionTpl >
Definition at line 29 of file data.hpp.



 Public Member Functions inherited from Serializable< DataTpl< _Scalar, _Options, JointCollectionTpl > >
Public Member Functions inherited from Serializable< DataTpl< _Scalar, _Options, JointCollectionTpl > > 1.8.13
1.8.13