Base for convex polytope. More...
#include <coal/shape/geometric_shapes.h>
Public Member Functions | |
| virtual | ~ConvexBaseTpl () |
| Base & | base () |
| Cast ConvexBaseTpl to ShapeBase. This method should never be marked as virtual. | |
| const Base & | base () const |
| Const cast ConvexBaseTpl to ShapeBase. This method should never be marked as virtual. | |
| ConvexBaseTpl (const ConvexBaseTpl &other) | |
| Copy constructor. The copy constructor only shallow copies the data (it copies the shared pointers but does not deep clones the data). | |
| ConvexBaseTpl & | operator= (const ConvexBaseTpl &other) |
| Copy assignment operator. The copy assignment operator shallow copies the data, just as the copy constructor. | |
| virtual ConvexBaseTpl * | clone () const |
| Clone (deep copy). | |
| virtual ConvexBaseTpl * | deepcopy () const |
| Deep copy of the ConvexBaseTpl. This method deep copies every field of the class. | |
| template<typename OtherIndexType > | |
| ConvexBaseTpl< OtherIndexType > | cast () const |
| Cast this ConvexBase vertex indices to OtherIndexType. This effectively deep copies this ConvexBaseTpl into a new one. | |
| void | computeLocalAABB () |
| Compute AABB. | |
| NODE_TYPE | getNodeType () const |
| Get node type: a convex polytope. | |
| IndexType | neighbor (IndexType i, IndexType j) const |
| Get the index of the j-th neighbor of the i-th vertex. | |
| NODE_TYPE | getNodeType () const |
| get the node type | |
| NODE_TYPE | getNodeType () const |
| get the node type | |
 Public Member Functions inherited from coal::ShapeBase Public Member Functions inherited from coal::ShapeBase | |
| ShapeBase () | |
| ShapeBase (const ShapeBase &other) | |
| | |
| ShapeBase & | operator= (const ShapeBase &other)=default |
| virtual | ~ShapeBase () |
| OBJECT_TYPE | getObjectType () const |
| Get object type: a geometric shape. | |
| void | setSweptSphereRadius (Scalar radius) |
| Set radius of sphere swept around the shape. Must be >= 0. | |
| Scalar | getSweptSphereRadius () const |
| Get radius of sphere swept around the shape. This radius is always >= 0. | |
| Public Member Functions inherited from coal::CollisionGeometry | |
| CollisionGeometry () | |
| CollisionGeometry (const CollisionGeometry &other)=default | |
| Copy constructor. | |
| virtual | ~CollisionGeometry () |
| bool | operator== (const CollisionGeometry &other) const |
| Equality operator. | |
| bool | operator!= (const CollisionGeometry &other) const |
| Difference operator. | |
| void * | getUserData () const |
| get user data in geometry | |
| void | setUserData (void *data) |
| set user data in geometry | |
| bool | isOccupied () const |
| whether the object is completely occupied | |
| bool | isFree () const |
| whether the object is completely free | |
| bool | isUncertain () const |
| whether the object has some uncertainty | |
| virtual Vec3s | computeCOM () const |
| compute center of mass | |
| virtual Matrix3s | computeMomentofInertia () const |
| compute the inertia matrix, related to the origin | |
| virtual Scalar | computeVolume () const |
| compute the volume | |
| virtual Matrix3s | computeMomentofInertiaRelatedToCOM () const |
| compute the inertia matrix, related to the com | |
Static Public Member Functions | |
| static ConvexBaseTpl * | convexHull (std::shared_ptr< std::vector< Vec3s > > &points, unsigned int num_points, bool keepTriangles, const char *qhullCommand=NULL) |
| Build a convex hull based on Qhull library and store the vertices and optionally the triangles. | |
| static ConvexBaseTpl * | convexHull (const Vec3s *points, unsigned int num_points, bool keepTriangles, const char *qhullCommand=NULL) |
Public Attributes | |
| std::shared_ptr< std::vector< Vec3s > > | points |
| An array of the points of the polygon. | |
| unsigned int | num_points |
| std::shared_ptr< std::vector< Vec3s > > | normals |
| An array of the normals of the polygon. | |
| std::shared_ptr< std::vector< Scalar > > | offsets |
| An array of the offsets to the normals of the polygon. Note: there are as many offsets as normals. | |
| unsigned int | num_normals_and_offsets |
| std::shared_ptr< std::vector< Neighbors > > | neighbors |
| Neighbors of each vertex. It is an array of size num_points. For each vertex, it contains the number of neighbors and a list of indices pointing to them. | |
| Vec3s | center |
| center of the convex polytope, this is used for collision: center is guaranteed in the internal of the polytope (as it is convex) | |
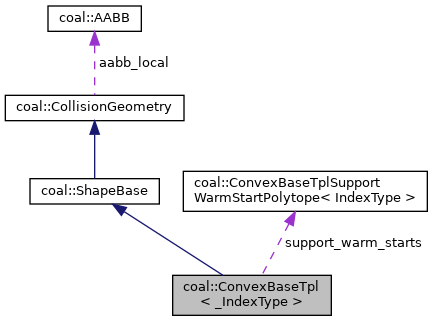
| SupportWarmStartPolytope | support_warm_starts |
| Support warm start polytopes. | |
| Public Attributes inherited from coal::CollisionGeometry | |
| Vec3s | aabb_center |
| AABB center in local coordinate. | |
| Scalar | aabb_radius |
| AABB radius. | |
| AABB | aabb_local |
| AABB in local coordinate, used for tight AABB when only translation transform. | |
| void * | user_data |
| pointer to user defined data specific to this object | |
| Scalar | cost_density |
| collision cost for unit volume | |
| Scalar | threshold_occupied |
| threshold for occupied ( >= is occupied) | |
| Scalar | threshold_free |
| threshold for free (<= is free) | |
Static Public Attributes | |
| static constexpr size_t | num_vertices_large_convex_threshold = 32 |
| Above this threshold, the convex polytope is considered large. This influcences the way the support function is computed. | |
| static constexpr size_t | num_support_warm_starts = 14 |
| Number of support warm starts. | |
Protected Member Functions | |
| ConvexBaseTpl () | |
| Construct an uninitialized convex object Initialization is done with ConvexBase::initialize. | |
| void | initialize (std::shared_ptr< std::vector< Vec3s > > points_, unsigned int num_points_) |
| Initialize the points of the convex shape This also initializes the ConvexBase::center. | |
| void | set (std::shared_ptr< std::vector< Vec3s > > points_, unsigned int num_points_) |
| Set the points of the convex shape. | |
| void | buildSupportWarmStart () |
| Build the support points warm starts. | |
| void | computeCenter () |
| virtual bool | isEqual (const CollisionGeometry &_other) const |
| equal operator with another object of derived type. | |
Static Protected Member Functions | |
| template<typename OtherIndexType > | |
| static void | deepcopy (const ConvexBaseTpl< IndexType > *source, ConvexBaseTpl< OtherIndexType > *copy) |
| Deep copy of a ConvexBaseTpl. This method deep copies every field of the class. | |
Protected Attributes | |
| std::shared_ptr< std::vector< IndexType > > | nneighbors_ |
Array of indices of the neighbors of each vertex. Since we don't know a priori the number of neighbors of each vertex, we store the indices of the neighbors in a single array. The neighbors attribute, an array of Neighbors, is used to point each vertex to the right indices in the nneighbors_ array. | |
| Protected Attributes inherited from coal::ShapeBase | |
| Scalar | m_swept_sphere_radius {0} |
Radius of the sphere swept around the shape. Default value is 0. Note: this property differs from inflated method of certain derived classes (e.g. Box, Sphere, Ellipsoid, Capsule, Cone, Cylinder) in the sense that inflated returns a new shape which can be inflated but also deflated. Also, an inflated shape is not rounded. It simply has a different size. Sweeping a shape with a sphere is a different operation (a Minkowski sum), which rounds the sharp corners of a shape. The swept sphere radius is a property of the shape itself and can be manually updated between collision checks. | |
Friends | |
| template<typename OtherIndexType > | |
| class | ConvexBaseTpl |
Detailed Description
Base for convex polytope.
- Template Parameters
-
_IndexType type of vertices indexes.
- Note
- Inherited classes are responsible for filling ConvexBase::neighbors;
Member Typedef Documentation
◆ Base
| typedef ShapeBase coal::ConvexBaseTpl< _IndexType >::Base |
◆ index_type
| typedef _IndexType coal::ConvexBaseTpl< _IndexType >::index_type |
◆ IndexType
| typedef _IndexType coal::ConvexBaseTpl< _IndexType >::IndexType |
◆ Neighbors
| using coal::ConvexBaseTpl< _IndexType >::Neighbors = coal::ConvexBaseTplNeighbors<IndexType> |
◆ SupportWarmStartPolytope
| using coal::ConvexBaseTpl< _IndexType >::SupportWarmStartPolytope = ConvexBaseTplSupportWarmStartPolytope<IndexType> |
Constructor & Destructor Documentation
◆ ~ConvexBaseTpl()
|
inlinevirtual |
◆ ConvexBaseTpl() [1/2]
|
inline |
Copy constructor. The copy constructor only shallow copies the data (it copies the shared pointers but does not deep clones the data).
◆ ConvexBaseTpl() [2/2]
|
inlineprotected |
Construct an uninitialized convex object Initialization is done with ConvexBase::initialize.
Member Function Documentation
◆ base() [1/2]
|
inline |
Cast ConvexBaseTpl to ShapeBase. This method should never be marked as virtual.
◆ base() [2/2]
|
inline |
Const cast ConvexBaseTpl to ShapeBase. This method should never be marked as virtual.
◆ buildSupportWarmStart()
|
protected |
Build the support points warm starts.
◆ cast()
|
inline |
Cast this ConvexBase vertex indices to OtherIndexType. This effectively deep copies this ConvexBaseTpl into a new one.
◆ clone()
|
inlinevirtual |
Clone (deep copy).
Implements coal::CollisionGeometry.
Reimplemented in coal::ConvexTpl< PolygonT >.
◆ computeCenter()
|
protected |
◆ computeLocalAABB()
|
virtual |
Compute AABB.
Implements coal::CollisionGeometry.
◆ convexHull() [1/2]
|
static |
◆ convexHull() [2/2]
|
static |
Build a convex hull based on Qhull library and store the vertices and optionally the triangles.
- Parameters
-
points,num_points the points whose convex hull should be computed. keepTriangles if true, returns a Convex<Triangle> object which contains the triangle of the shape.qhullCommand the command sent to qhull. - if
keepTrianglesistrue, this parameter should include "Qt". IfNULL, "Qt" is passed to Qhull. - if
keepTrianglesisfalse, an empty string is passed to Qhull.
- if
- Note
- Coal must have been compiled with option
COAL_HAS_QHULLset toON.
◆ deepcopy() [1/2]
|
inlinevirtual |
Deep copy of the ConvexBaseTpl. This method deep copies every field of the class.
Reimplemented in coal::ConvexTpl< PolygonT >.
◆ deepcopy() [2/2]
|
staticprotected |
Deep copy of a ConvexBaseTpl. This method deep copies every field of the class.
◆ getNodeType() [1/3]
|
virtual |
Get node type: a convex polytope.
Reimplemented from coal::CollisionGeometry.
◆ getNodeType() [2/3]
|
inlinevirtual |
get the node type
Reimplemented from coal::CollisionGeometry.
◆ getNodeType() [3/3]
|
inlinevirtual |
get the node type
Reimplemented from coal::CollisionGeometry.
◆ initialize()
|
protected |
Initialize the points of the convex shape This also initializes the ConvexBase::center.
- Parameters
-
points_ list of 3D points /// num_points_ number of 3D points
◆ isEqual()
|
inlineprotectedvirtual |
equal operator with another object of derived type.
Implements coal::CollisionGeometry.
◆ neighbor()
|
inline |
Get the index of the j-th neighbor of the i-th vertex.
◆ operator=()
| ConvexBaseTpl< IndexType > & coal::ConvexBaseTpl< IndexType >::operator= | ( | const ConvexBaseTpl< _IndexType > & | other | ) |
Copy assignment operator. The copy assignment operator shallow copies the data, just as the copy constructor.
◆ set()
|
protected |
Set the points of the convex shape.
- Parameters
-
points_ list of 3D points /// num_points_ number of 3D points
Friends And Related Symbol Documentation
◆ ConvexBaseTpl
Member Data Documentation
◆ center
| Vec3s coal::ConvexBaseTpl< _IndexType >::center |
center of the convex polytope, this is used for collision: center is guaranteed in the internal of the polytope (as it is convex)
◆ neighbors
| std::shared_ptr<std::vector<Neighbors> > coal::ConvexBaseTpl< _IndexType >::neighbors |
Neighbors of each vertex. It is an array of size num_points. For each vertex, it contains the number of neighbors and a list of indices pointing to them.
◆ nneighbors_
|
protected |
Array of indices of the neighbors of each vertex. Since we don't know a priori the number of neighbors of each vertex, we store the indices of the neighbors in a single array. The neighbors attribute, an array of Neighbors, is used to point each vertex to the right indices in the nneighbors_ array.
◆ normals
| std::shared_ptr<std::vector<Vec3s> > coal::ConvexBaseTpl< _IndexType >::normals |
An array of the normals of the polygon.
◆ num_normals_and_offsets
| unsigned int coal::ConvexBaseTpl< _IndexType >::num_normals_and_offsets |
◆ num_points
| unsigned int coal::ConvexBaseTpl< _IndexType >::num_points |
◆ num_support_warm_starts
|
staticconstexpr |
Number of support warm starts.
◆ num_vertices_large_convex_threshold
|
staticconstexpr |
Above this threshold, the convex polytope is considered large. This influcences the way the support function is computed.
◆ offsets
| std::shared_ptr<std::vector<Scalar> > coal::ConvexBaseTpl< _IndexType >::offsets |
An array of the offsets to the normals of the polygon. Note: there are as many offsets as normals.
◆ points
| std::shared_ptr<std::vector<Vec3s> > coal::ConvexBaseTpl< _IndexType >::points |
An array of the points of the polygon.
◆ support_warm_starts
| SupportWarmStartPolytope coal::ConvexBaseTpl< _IndexType >::support_warm_starts |
Support warm start polytopes.
The documentation for this class was generated from the following files:
- include/coal/BVH/BVH_model.h
- include/coal/shape/geometric_shapes.h
- include/coal/shape/geometric_shapes.hxx