Loading...
Searching...
No Matches
data.hh File Reference
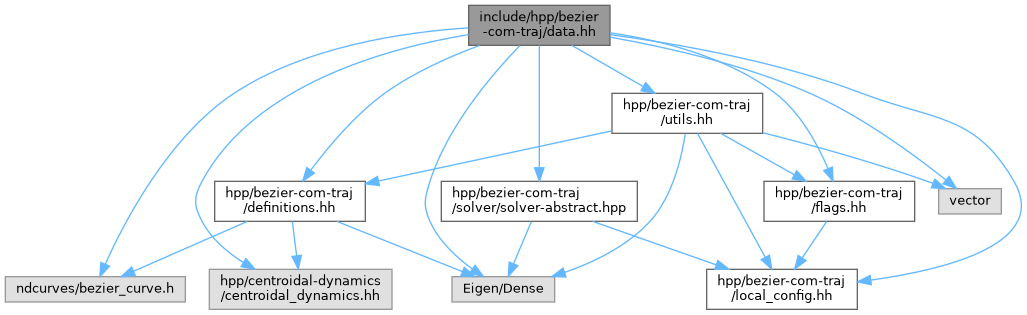
#include <ndcurves/bezier_curve.h>#include <Eigen/Dense>#include <hpp/bezier-com-traj/definitions.hh>#include <hpp/bezier-com-traj/flags.hh>#include <hpp/bezier-com-traj/local_config.hh>#include <hpp/bezier-com-traj/solver/solver-abstract.hpp>#include <hpp/bezier-com-traj/utils.hh>#include <hpp/centroidal-dynamics/centroidal_dynamics.hh>#include <vector>
Include dependency graph for data.hh:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | bezier_com_traj::ContactData |
| Contact data contains all the contact information relative to a contact phase: contact points and normals (within Equilibrium object), as well as any additional kinematic and angular constraints. More... | |
| struct | bezier_com_traj::Constraints |
| Used to define the constraints on the trajectory generation problem. Flags are used to constrain initial and terminal com positions an derivatives. Additionally, the maximum acceleration can be bounded. More... | |
| struct | bezier_com_traj::ProblemData |
| Defines all the inputs of the problem: Initial and terminal constraints, as well as selected cost functions. Also,a list of ContactData defines the different phases of the problem. While the method can handle any phase greater than one, using more than three phases is probably too constraining. More... | |
| struct | bezier_com_traj::ResultDataCOMTraj |
| Specialized ResultData that computes the Bezier curves corresponding to the computed trajectory. More... | |
Namespaces | |
| namespace | bezier_com_traj |
Typedefs | |
| typedef solvers::ResultData | bezier_com_traj::ResultData |