Loading...
Searching...
No Matches
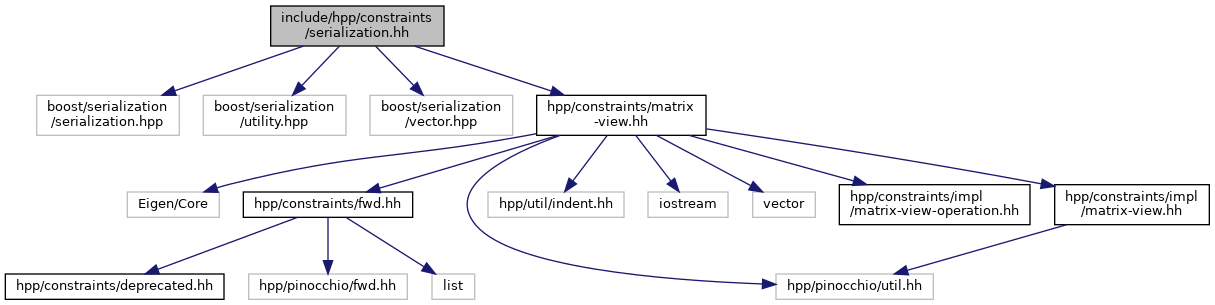
serialization.hh File Reference
#include <boost/serialization/serialization.hpp>#include <boost/serialization/utility.hpp>#include <boost/serialization/vector.hpp>#include <hpp/constraints/matrix-view.hh>
Include dependency graph for serialization.hh:
Go to the source code of this file.
Namespaces | |
| namespace | boost |
| namespace | boost::serialization |
Functions | |
| template<class Archive > | |
| void | boost::serialization::segments_serialize (Archive &ar, const char *n, Eigen::BlockIndex::segments_t &s) |
| template<class Archive > | |
| void | boost::serialization::segments_serialize (Archive &, const char *, Eigen::internal::empty_struct &) |
| template<class Archive , bool _allRows, bool _allCols> | |
| void | boost::serialization::serialize (Archive &ar, Eigen::MatrixBlocks< _allRows, _allCols > &b, const unsigned int version) |