#include <hpp/core/problem-solver.hh>
Public Types | |
| typedef std::vector< PathOptimizerPtr_t > | PathOptimizers_t |
| typedef std::vector< std::string > | PathOptimizerTypes_t |
| typedef std::vector< std::string > | ConfigValidationTypes_t |
Public Member Functions | |
| virtual | ~ProblemSolver () |
| Destructor. More... | |
| void | robotType (const std::string &type) |
| const std::string & | robotType () const |
| Get robot type. More... | |
| DevicePtr_t | createRobot (const std::string &name) |
| virtual void | robot (const DevicePtr_t &robot) |
| Set robot. More... | |
| const DevicePtr_t & | robot () const |
| Get robot. More... | |
| ProblemPtr_t | problem () |
| Get pointer to problem. More... | |
| const Configuration_t & | initConfig () const |
| Get shared pointer to initial configuration. More... | |
| virtual void | initConfig (ConfigurationIn_t config) |
| Set initial configuration. More... | |
| const Configurations_t & | goalConfigs () const |
| Get number of goal configuration. More... | |
| virtual void | addGoalConfig (ConfigurationIn_t config) |
| Add goal configuration. More... | |
| void | resetGoalConfigs () |
| Reset the set of goal configurations. More... | |
| void | setGoalConstraints (const NumericalConstraints_t &constraints) |
| Set goal of path planning as a set of constraints. More... | |
| void | resetGoalConstraints () |
| Stop defining the goal of path planning as a set of constraints. More... | |
| virtual void | pathPlannerType (const std::string &type) |
| Set path planner type. More... | |
| const std::string & | pathPlannerType () const |
| void | distanceType (const std::string &type) |
| Set distance type. More... | |
| const std::string & | distanceType () const |
| void | steeringMethodType (const std::string &type) |
| Set steering method type. More... | |
| const std::string & | steeringMethodType () const |
| void | configurationShooterType (const std::string &type) |
| Set configuration shooter type. More... | |
| const std::string & | configurationShooterType () const |
| const PathPlannerPtr_t & | pathPlanner () const |
| Get path planner. More... | |
| void | addPathOptimizer (const std::string &type) |
| const PathOptimizerTypes_t & | pathOptimizerTypes () const |
| void | clearPathOptimizers () |
| Clear the vector of path optimizers. More... | |
| const PathOptimizerPtr_t & | pathOptimizer (std::size_t rank) const |
| Get path optimizer at given rank. More... | |
| void | optimizePath (PathVectorPtr_t path) |
| virtual void | pathValidationType (const std::string &type, const value_type &tolerance) |
| const std::string & | pathValidationType (value_type &tolerance) const |
| void | pathProjectorType (const std::string &type, const value_type &step) |
| const std::string & | pathProjectorType (value_type &tolerance) const |
| Get path projector current type and get tolerance. More... | |
| virtual void | addConfigValidation (const std::string &type) |
| const ConfigValidationTypes_t | configValidationTypes () |
| Get config validation current types. More... | |
| void | clearConfigValidations () |
| void | addConfigValidationBuilder (const std::string &type, const ConfigValidationBuilder_t &builder) |
| Add a new available config validation method. More... | |
| const RoadmapPtr_t & | roadmap () const |
| virtual void | resetProblem () |
| Create new problem. More... | |
| virtual void | resetRoadmap () |
| const ObjectStdVector_t & | collisionObstacles () const |
| Local vector of objects considered for collision detection. More... | |
| const ObjectStdVector_t & | distanceObstacles () const |
| Local vector of objects considered for distance computation. More... | |
| void | roadmap (const RoadmapPtr_t &roadmap) |
| Set the roadmap. More... | |
| void | initDistance () |
| void | initSteeringMethod () |
| void | initPathProjector () |
| void | initPathValidation () |
| Set path validation by calling path validation factory. More... | |
| void | initConfigValidation () |
| Set config validation by calling config validation factories. More... | |
| void | initValidations () |
| Initialize the config and path validations and add the obstacles. More... | |
| virtual void | initProblemTarget () |
| Initialize the problem target by calling the path validation factory. More... | |
Constraints | |
| void | addConstraint (const ConstraintPtr_t &constraint) |
| Add a constraint. More... | |
| const ConstraintSetPtr_t & | constraints () const |
| Get constraint set. More... | |
| virtual void | resetConstraints () |
| Reset constraint set. More... | |
| virtual void | addNumericalConstraintToConfigProjector (const std::string &configProjName, const std::string &constraintName, const std::size_t priority=0) |
| void | addNumericalConstraint (const std::string &name, const constraints::ImplicitPtr_t &constraint) |
| void | comparisonType (const std::string &name, const ComparisonTypes_t types) |
| void | comparisonType (const std::string &name, const ComparisonType &type) |
| ComparisonTypes_t | comparisonType (const std::string &name) const |
| constraints::ImplicitPtr_t | numericalConstraint (const std::string &name) |
| Get constraint with given name. More... | |
| void | computeValueAndJacobian (const Configuration_t &configuration, vector_t &value, matrix_t &jacobian) const |
| void | maxIterProjection (size_type iterations) |
| Set maximal number of iterations in config projector. More... | |
| size_type | maxIterProjection () const |
| Get maximal number of iterations in config projector. More... | |
| void | maxIterPathPlanning (size_type iterations) |
| Set maximal number of iterations in config projector. More... | |
| size_type | maxIterPathPlanning () const |
| Get maximal number of iterations in config projector. More... | |
| void | setTimeOutPathPlanning (double timeOut) |
| set time out for the path planning ( in seconds) More... | |
| double | getTimeOutPathPlanning () |
| set time out for the path planning ( in seconds) More... | |
| void | errorThreshold (const value_type &threshold) |
| Set error threshold in config projector. More... | |
| value_type | errorThreshold () const |
| Get errorimal number of threshold in config projector. More... | |
Solve problem and get paths | |
| void | createPathOptimizers () |
| virtual bool | prepareSolveStepByStep () |
| virtual bool | executeOneStep () |
| virtual void | finishSolveStepByStep () |
| virtual void | solve () |
| Set and solve the problem. More... | |
| bool | directPath (ConfigurationIn_t start, ConfigurationIn_t end, bool validate, std::size_t &pathId, std::string &report) |
| void | addConfigToRoadmap (ConfigurationIn_t config) |
| Add random configuration into roadmap as new node. More... | |
| void | addEdgeToRoadmap (ConfigurationIn_t config1, ConfigurationIn_t config2, const PathPtr_t &path) |
| void | interrupt () |
| Interrupt path planning and path optimization. More... | |
| std::size_t | addPath (const PathVectorPtr_t &path) |
| Add a path. More... | |
| void | erasePath (std::size_t pathId) |
| Erase a path. More... | |
| const PathVectors_t & | paths () const |
| Return vector of paths. More... | |
Obstacles | |
| virtual void | addObstacle (const DevicePtr_t &device, bool collision, bool distance) |
| virtual void | addObstacle (const CollisionObjectPtr_t &inObject, bool collision, bool distance) |
| virtual void | removeObstacle (const std::string &name) |
| virtual void | addObstacle (const std::string &name, const CollisionGeometryPtr_t &inObject, const Transform3s &pose, bool collision, bool distance) |
| virtual void | addObstacle (const std::string &name, FclCollisionObject &inObject, bool collision, bool distance) |
| void | removeObstacleFromJoint (const std::string &jointName, const std::string &obstacleName) |
| void | cutObstacle (const std::string &name, const coal::AABB &aabb) |
| void | filterCollisionPairs () |
| CollisionObjectPtr_t | obstacle (const std::string &name) const |
| const Transform3s & | obstacleFramePosition (const std::string &name) const |
| std::list< std::string > | obstacleNames (bool collision, bool distance) const |
| const DistanceBetweenObjectsPtr_t & | distanceBetweenObjects () const |
| Return list of pair of distance computations. More... | |
| pinocchio::GeomModelPtr_t | obstacleGeomModel () const |
| pinocchio::GeomDataPtr_t | obstacleGeomData () const |
Static Public Member Functions | |
| static ProblemSolverPtr_t | create () |
| Create instance and return pointer. More... | |
Protected Member Functions | |
| ProblemSolver () | |
| void | problem (ProblemPtr_t problem) |
| Set pointer to problem. More... | |
| virtual void | initializeProblem (ProblemPtr_t problem) |
Protected Attributes | |
| ConstraintSetPtr_t | constraints_ |
| Store constraints until call to solve. More... | |
| DevicePtr_t | robot_ |
| Robot. More... | |
| ProblemPtr_t | problem_ |
| Problem. More... | |
| PathPlannerPtr_t | pathPlanner_ |
| RoadmapPtr_t | roadmap_ |
| Store roadmap. More... | |
| PathVectors_t | paths_ |
| Paths. More... | |
| std::string | pathProjectorType_ |
| Path projector method. More... | |
| value_type | pathProjectorTolerance_ |
| Tolerance of path projector. More... | |
| std::string | pathPlannerType_ |
| Path planner. More... | |
| ProblemTargetPtr_t | target_ |
| Shared pointer to the problem target. More... | |
Detailed Description
Set and solve a path planning problem
This class is a container that does the interface between hpp-core library and component to be running in a middleware like CORBA or ROS.
Member Typedef Documentation
◆ ConfigValidationTypes_t
| typedef std::vector<std::string> hpp::core::ProblemSolver::ConfigValidationTypes_t |
◆ PathOptimizers_t
| typedef std::vector<PathOptimizerPtr_t> hpp::core::ProblemSolver::PathOptimizers_t |
◆ PathOptimizerTypes_t
| typedef std::vector<std::string> hpp::core::ProblemSolver::PathOptimizerTypes_t |
Constructor & Destructor Documentation
◆ ~ProblemSolver()
|
virtual |
Destructor.
◆ ProblemSolver()
|
protected |
Constructor
Call create to create an instance.
Member Function Documentation
◆ addConfigToRoadmap()
| void hpp::core::ProblemSolver::addConfigToRoadmap | ( | ConfigurationIn_t | config | ) |
Add random configuration into roadmap as new node.
◆ addConfigValidation()
|
virtual |
Add a config validation method
- Parameters
-
type name of new config validation method Config validation methods are used to validate individual configurations of the robot.
◆ addConfigValidationBuilder()
| void hpp::core::ProblemSolver::addConfigValidationBuilder | ( | const std::string & | type, |
| const ConfigValidationBuilder_t & | builder | ||
| ) |
Add a new available config validation method.
◆ addConstraint()
| void hpp::core::ProblemSolver::addConstraint | ( | const ConstraintPtr_t & | constraint | ) |
Add a constraint.
◆ addEdgeToRoadmap()
| void hpp::core::ProblemSolver::addEdgeToRoadmap | ( | ConfigurationIn_t | config1, |
| ConfigurationIn_t | config2, | ||
| const PathPtr_t & | path | ||
| ) |
Add an edge between two roadmap nodes.
- Parameters
-
config1 configuration of start node, config2 configuration of destination node, path path to store in the edge.
Check that nodes containing config1 and config2 exist in the roadmap.
◆ addGoalConfig()
|
virtual |
Add goal configuration.
◆ addNumericalConstraint()
|
inline |
Add a a numerical constraint in local map.
- Parameters
-
name name of the numerical constraint as stored in local map, constraint numerical constraint
Numerical constraints are to be inserted in the ConfigProjector of the constraint set.
◆ addNumericalConstraintToConfigProjector()
|
virtual |
Add numerical constraint to the config projector
- Parameters
-
configProjName Name given to config projector if created by this method. constraintName name of the function as stored in internal map. Build the config projector if not yet constructed.
◆ addObstacle() [1/4]
|
virtual |
Add obstacle to the list.
- Parameters
-
inObject a new object. collision whether collision checking should be performed for this object. distance whether distance computation should be performed for this object.
◆ addObstacle() [2/4]
|
virtual |
Add collision objects of a device as obstacles to the list.
- Parameters
-
device the Device to be added. collision whether collision checking should be performed for this object. distance whether distance computation should be performed for this object.
◆ addObstacle() [3/4]
|
virtual |
Add obstacle to the list.
- Parameters
-
inObject a new object. pose the object pose. collision whether collision checking should be performed for this object. distance whether distance computation should be performed for this object.
◆ addObstacle() [4/4]
|
virtual |
Add obstacle to the list.
- Parameters
-
inObject a new object. collision whether collision checking should be performed for this object. distance whether distance computation should be performed for this object.
◆ addPath()
|
inline |
Add a path.
◆ addPathOptimizer()
| void hpp::core::ProblemSolver::addPathOptimizer | ( | const std::string & | type | ) |
Add a path optimizer in the vector
- Parameters
-
name of the type of path optimizer that should be added
◆ clearConfigValidations()
| void hpp::core::ProblemSolver::clearConfigValidations | ( | ) |
◆ clearPathOptimizers()
| void hpp::core::ProblemSolver::clearPathOptimizers | ( | ) |
Clear the vector of path optimizers.
◆ collisionObstacles()
| const ObjectStdVector_t& hpp::core::ProblemSolver::collisionObstacles | ( | ) | const |
Local vector of objects considered for collision detection.
◆ comparisonType() [1/3]
| ComparisonTypes_t hpp::core::ProblemSolver::comparisonType | ( | const std::string & | name | ) | const |
◆ comparisonType() [2/3]
| void hpp::core::ProblemSolver::comparisonType | ( | const std::string & | name, |
| const ComparisonType & | type | ||
| ) |
◆ comparisonType() [3/3]
| void hpp::core::ProblemSolver::comparisonType | ( | const std::string & | name, |
| const ComparisonTypes_t | types | ||
| ) |
Set the comparison types of a constraint.
- Parameters
-
name name of the differentiable function.
◆ computeValueAndJacobian()
| void hpp::core::ProblemSolver::computeValueAndJacobian | ( | const Configuration_t & | configuration, |
| vector_t & | value, | ||
| matrix_t & | jacobian | ||
| ) | const |
Compute value and Jacobian of numerical constraints
- Parameters
-
configuration input configuration
- Return values
-
value values of the numerical constraints stacked in a unique vector, jacobian Jacobian of the numerical constraints stacked in a unique matrix.
Columns of the Jacobian corresponding to locked joints are omitted, columns corresponding to passive dofs are set to 0.
◆ configurationShooterType() [1/2]
|
inline |
◆ configurationShooterType() [2/2]
| void hpp::core::ProblemSolver::configurationShooterType | ( | const std::string & | type | ) |
Set configuration shooter type.
◆ configValidationTypes()
|
inline |
Get config validation current types.
◆ constraints()
|
inline |
Get constraint set.
◆ create()
|
static |
Create instance and return pointer.
◆ createPathOptimizers()
| void hpp::core::ProblemSolver::createPathOptimizers | ( | ) |
Create Path optimizer if needed
If a path optimizer is already set, do nothing. Type of optimizer is determined by method selectPathOptimizer.
◆ createRobot()
| DevicePtr_t hpp::core::ProblemSolver::createRobot | ( | const std::string & | name | ) |
Create a robot of a type defined by method setRobotType
- Parameters
-
name name of the robot
Robot is stored in problemSolver.
◆ cutObstacle()
| void hpp::core::ProblemSolver::cutObstacle | ( | const std::string & | name, |
| const coal::AABB & | aabb | ||
| ) |
Extract from the obstacle the part that can collide with aabb
- Warning
- the obstacle is removed if there are not possible collision.
◆ directPath()
| bool hpp::core::ProblemSolver::directPath | ( | ConfigurationIn_t | start, |
| ConfigurationIn_t | end, | ||
| bool | validate, | ||
| std::size_t & | pathId, | ||
| std::string & | report | ||
| ) |
Make direct connection between two configurations
- Parameters
-
start,end the configurations to link. validate whether path should be validated. If true, path validation is called and only valid part of path is inserted in the path vector.
- Return values
-
pathId Id of the path that is inserted in the path vector, report Reason for non validation if relevant. return false if direct path is not fully valid
- Note
- If path is only partly valid, valid part starting at start configuration is inserted in path vector.
◆ distanceBetweenObjects()
|
inline |
Return list of pair of distance computations.
◆ distanceObstacles()
| const ObjectStdVector_t& hpp::core::ProblemSolver::distanceObstacles | ( | ) | const |
Local vector of objects considered for distance computation.
◆ distanceType() [1/2]
|
inline |
◆ distanceType() [2/2]
| void hpp::core::ProblemSolver::distanceType | ( | const std::string & | type | ) |
Set distance type.
◆ erasePath()
|
inline |
Erase a path.
◆ errorThreshold() [1/2]
|
inline |
Get errorimal number of threshold in config projector.
◆ errorThreshold() [2/2]
| void hpp::core::ProblemSolver::errorThreshold | ( | const value_type & | threshold | ) |
Set error threshold in config projector.
◆ executeOneStep()
|
virtual |
Execute one step of the planner.
- Returns
- the return value of PathPlanner::pathExists of the selected planner.
- Note
- This won't check if a solution has been found before doing one step. The decision to stop planning is let to the user.
◆ filterCollisionPairs()
| void hpp::core::ProblemSolver::filterCollisionPairs | ( | ) |
Build matrix of relative motions between joints
◆ finishSolveStepByStep()
|
virtual |
Finish the solving procedure The path optimizer is not called
◆ getTimeOutPathPlanning()
|
inline |
set time out for the path planning ( in seconds)
◆ goalConfigs()
| const Configurations_t& hpp::core::ProblemSolver::goalConfigs | ( | ) | const |
Get number of goal configuration.
◆ initConfig() [1/2]
|
inline |
Get shared pointer to initial configuration.
◆ initConfig() [2/2]
|
virtual |
Set initial configuration.
◆ initConfigValidation()
| void hpp::core::ProblemSolver::initConfigValidation | ( | ) |
Set config validation by calling config validation factories.
◆ initDistance()
| void hpp::core::ProblemSolver::initDistance | ( | ) |
Initialize distance
Set distance by calling the distance factory
◆ initializeProblem()
|
protectedvirtual |
Initialize the new problem
- Parameters
-
problem is inserted in the ProblemSolver and initialized.
- Note
- The previous Problem, if any, is not deleted. The function should be called when creating Problem object, in resetProblem() and all reimplementation in inherited class.
◆ initPathProjector()
| void hpp::core::ProblemSolver::initPathProjector | ( | ) |
Initialize path projector
Set path projector by calling path projector factory
◆ initPathValidation()
| void hpp::core::ProblemSolver::initPathValidation | ( | ) |
Set path validation by calling path validation factory.
◆ initProblemTarget()
|
virtual |
Initialize the problem target by calling the path validation factory.
◆ initSteeringMethod()
| void hpp::core::ProblemSolver::initSteeringMethod | ( | ) |
Initialize steering method
Set steering method by calling the steering method factory
◆ initValidations()
| void hpp::core::ProblemSolver::initValidations | ( | ) |
Initialize the config and path validations and add the obstacles.
◆ interrupt()
| void hpp::core::ProblemSolver::interrupt | ( | ) |
Interrupt path planning and path optimization.
◆ maxIterPathPlanning() [1/2]
|
inline |
Get maximal number of iterations in config projector.
◆ maxIterPathPlanning() [2/2]
| void hpp::core::ProblemSolver::maxIterPathPlanning | ( | size_type | iterations | ) |
Set maximal number of iterations in config projector.
◆ maxIterProjection() [1/2]
|
inline |
Get maximal number of iterations in config projector.
◆ maxIterProjection() [2/2]
| void hpp::core::ProblemSolver::maxIterProjection | ( | size_type | iterations | ) |
Set maximal number of iterations in config projector.
◆ numericalConstraint()
|
inline |
Get constraint with given name.
◆ obstacle()
| CollisionObjectPtr_t hpp::core::ProblemSolver::obstacle | ( | const std::string & | name | ) | const |
Get obstacle by name Throws if obstacle does not exists.
◆ obstacleFramePosition()
| const Transform3s& hpp::core::ProblemSolver::obstacleFramePosition | ( | const std::string & | name | ) | const |
Get obstacle frame position by name Throws if obstacle frame does not exists.
◆ obstacleGeomData()
|
inline |
◆ obstacleGeomModel()
|
inline |
◆ obstacleNames()
| std::list<std::string> hpp::core::ProblemSolver::obstacleNames | ( | bool | collision, |
| bool | distance | ||
| ) | const |
Get list of obstacle names
- Parameters
-
collision whether to return collision obstacle names distance whether to return distance obstacle names
- Returns
- list of obstacle names
◆ optimizePath()
| void hpp::core::ProblemSolver::optimizePath | ( | PathVectorPtr_t | path | ) |
Optimize path
- Parameters
-
path path to optimize Build vector of path optimizers if needed
- Note
- each intermediate optimization output is stored in this object.
◆ pathOptimizer()
|
inline |
Get path optimizer at given rank.
◆ pathOptimizerTypes()
|
inline |
◆ pathPlanner()
|
inline |
Get path planner.
◆ pathPlannerType() [1/2]
|
inline |
◆ pathPlannerType() [2/2]
|
virtual |
Set path planner type.
◆ pathProjectorType() [1/2]
| void hpp::core::ProblemSolver::pathProjectorType | ( | const std::string & | type, |
| const value_type & | step | ||
| ) |
Set path projector method
- Parameters
-
type name of new path validation method step discontinuity tolerance
◆ pathProjectorType() [2/2]
|
inline |
Get path projector current type and get tolerance.
◆ paths()
|
inline |
Return vector of paths.
◆ pathValidationType() [1/2]
|
virtual |
Set path validation method
- Parameters
-
type name of new path validation method tolerance acceptable penetration for path validation Path validation methods are used to validate edges in path planning path optimization methods.
◆ pathValidationType() [2/2]
|
inline |
◆ prepareSolveStepByStep()
|
virtual |
Prepare the solver for a step by step planning. and try to make direct connections (call PathPlanner::tryDirectPath)
- Returns
- the return value of PathPlanner::pathExists
◆ problem() [1/2]
|
inline |
Get pointer to problem.
◆ problem() [2/2]
|
protected |
Set pointer to problem.
◆ removeObstacle()
|
virtual |
Remove obstacle from the list.
- Parameters
-
name name of the obstacle
◆ removeObstacleFromJoint()
| void hpp::core::ProblemSolver::removeObstacleFromJoint | ( | const std::string & | jointName, |
| const std::string & | obstacleName | ||
| ) |
Remove collision pair between a joint and an obstacle
- Parameters
-
jointName name of the joint, obstacleName name of the obstacle
◆ resetConstraints()
|
virtual |
Reset constraint set.
◆ resetGoalConfigs()
| void hpp::core::ProblemSolver::resetGoalConfigs | ( | ) |
Reset the set of goal configurations.
◆ resetGoalConstraints()
| void hpp::core::ProblemSolver::resetGoalConstraints | ( | ) |
Stop defining the goal of path planning as a set of constraints.
◆ resetProblem()
|
virtual |
Create new problem.
◆ resetRoadmap()
|
virtual |
Reset the roadmap.
- Note
- When joints bounds are changed, the roadmap must be reset because the kd tree must be resized.
◆ roadmap() [1/2]
|
inline |
◆ roadmap() [2/2]
|
inline |
Set the roadmap.
◆ robot() [1/2]
| const DevicePtr_t& hpp::core::ProblemSolver::robot | ( | ) | const |
Get robot.
◆ robot() [2/2]
|
virtual |
Set robot.
◆ robotType() [1/2]
| const std::string& hpp::core::ProblemSolver::robotType | ( | ) | const |
Get robot type.
◆ robotType() [2/2]
| void hpp::core::ProblemSolver::robotType | ( | const std::string & | type | ) |
Set robot type
- Parameters
-
type type of the robots that will be created later
◆ setGoalConstraints()
| void hpp::core::ProblemSolver::setGoalConstraints | ( | const NumericalConstraints_t & | constraints | ) |
Set goal of path planning as a set of constraints.
◆ setTimeOutPathPlanning()
|
inline |
set time out for the path planning ( in seconds)
◆ solve()
|
virtual |
Set and solve the problem.
◆ steeringMethodType() [1/2]
|
inline |
◆ steeringMethodType() [2/2]
| void hpp::core::ProblemSolver::steeringMethodType | ( | const std::string & | type | ) |
Set steering method type.
Member Data Documentation
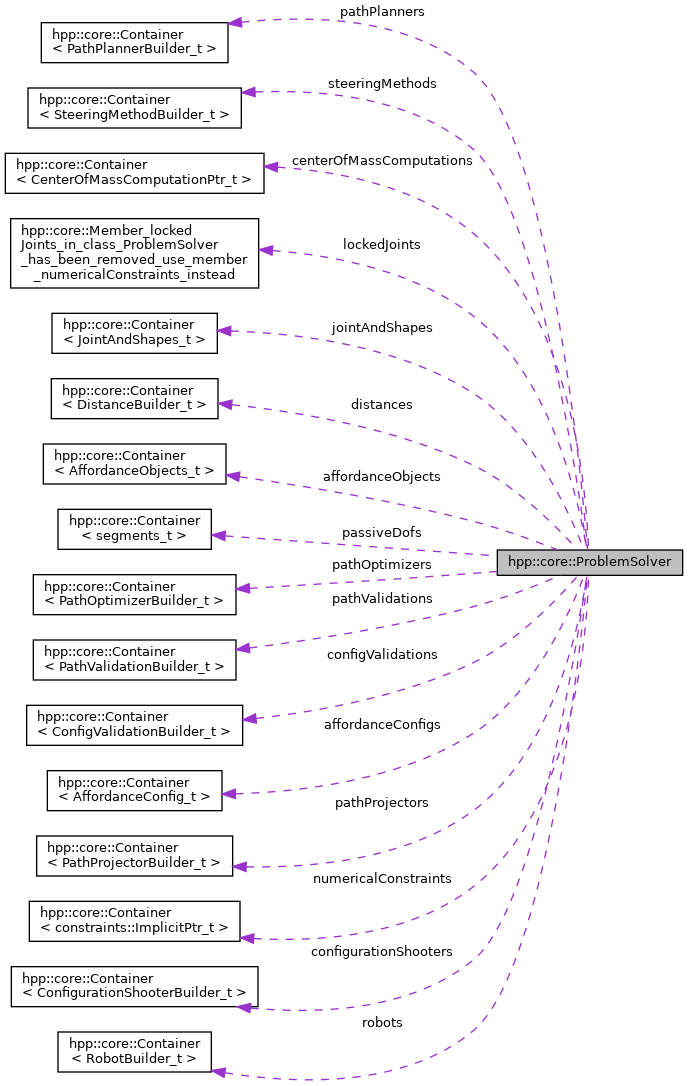
◆ affordanceConfigs
| Container<AffordanceConfig_t> hpp::core::ProblemSolver::affordanceConfigs |
Container of AffordanceConfig_t.
◆ affordanceObjects
| Container<AffordanceObjects_t> hpp::core::ProblemSolver::affordanceObjects |
Container of AffordanceObjects_t.
◆ centerOfMassComputations
| Container<CenterOfMassComputationPtr_t> hpp::core::ProblemSolver::centerOfMassComputations |
Container of CenterOfMassComputation.
◆ configurationShooters
| Container<ConfigurationShooterBuilder_t> hpp::core::ProblemSolver::configurationShooters |
Container of static method that creates a ConfigurationShooter with a robot as input
◆ configValidations
| Container<ConfigValidationBuilder_t> hpp::core::ProblemSolver::configValidations |
Container of static method that creates a ConfigValidation with a robot as input.
◆ constraints_
|
protected |
Store constraints until call to solve.
◆ distances
| Container<DistanceBuilder_t> hpp::core::ProblemSolver::distances |
◆ jointAndShapes
| Container<JointAndShapes_t> hpp::core::ProblemSolver::jointAndShapes |
Container of JointAndShapes_t.
◆ lockedJoints
| Member_lockedJoints_in_class_ProblemSolver_has_been_removed_use_member_numericalConstraints_instead hpp::core::ProblemSolver::lockedJoints |
member lockedJoints has been removed. LockedJointPtr_t instances are now stored with constraints::ImplicitPtr_t in member numericalConstraints.
◆ numericalConstraints
| Container<constraints::ImplicitPtr_t> hpp::core::ProblemSolver::numericalConstraints |
Container of constraints::Implicit.
◆ passiveDofs
| Container<segments_t> hpp::core::ProblemSolver::passiveDofs |
Container of passive DoFs (as segments_t)
◆ pathOptimizers
| Container<PathOptimizerBuilder_t> hpp::core::ProblemSolver::pathOptimizers |
Container of static method that creates a PathOptimizer with a problem as input
◆ pathPlanner_
|
protected |
◆ pathPlanners
| Container<PathPlannerBuilder_t> hpp::core::ProblemSolver::pathPlanners |
Container of static method that creates a PathPlanner with a problem and a roadmap as input
◆ pathPlannerType_
|
protected |
Path planner.
◆ pathProjectors
| Container<PathProjectorBuilder_t> hpp::core::ProblemSolver::pathProjectors |
Container of static method that creates a PathProjection with a problem and a tolerance as input.
◆ pathProjectorTolerance_
|
protected |
Tolerance of path projector.
◆ pathProjectorType_
|
protected |
Path projector method.
◆ paths_
|
protected |
Paths.
◆ pathValidations
| Container<PathValidationBuilder_t> hpp::core::ProblemSolver::pathValidations |
Container of static method that creates a PathValidation with a robot and a tolerance as input.
◆ problem_
|
protected |
◆ roadmap_
|
protected |
Store roadmap.
◆ robot_
|
protected |
Robot.
◆ robots
| Container<RobotBuilder_t> hpp::core::ProblemSolver::robots |
Container of static method that creates a Robot with string as input
◆ steeringMethods
| Container<SteeringMethodBuilder_t> hpp::core::ProblemSolver::steeringMethods |
Container of static method that creates a SteeringMethod with a problem as input
◆ target_
|
protected |
Shared pointer to the problem target.
The documentation for this class was generated from the following file:
- include/hpp/core/problem-solver.hh