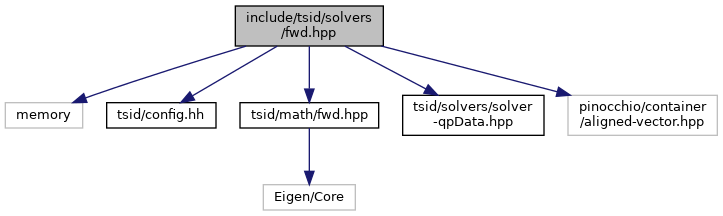
#include <memory>#include "tsid/config.hh"#include "tsid/math/fwd.hpp"#include "tsid/solvers/solver-qpData.hpp"#include <pinocchio/container/aligned-vector.hpp>
Include dependency graph for fwd.hpp:
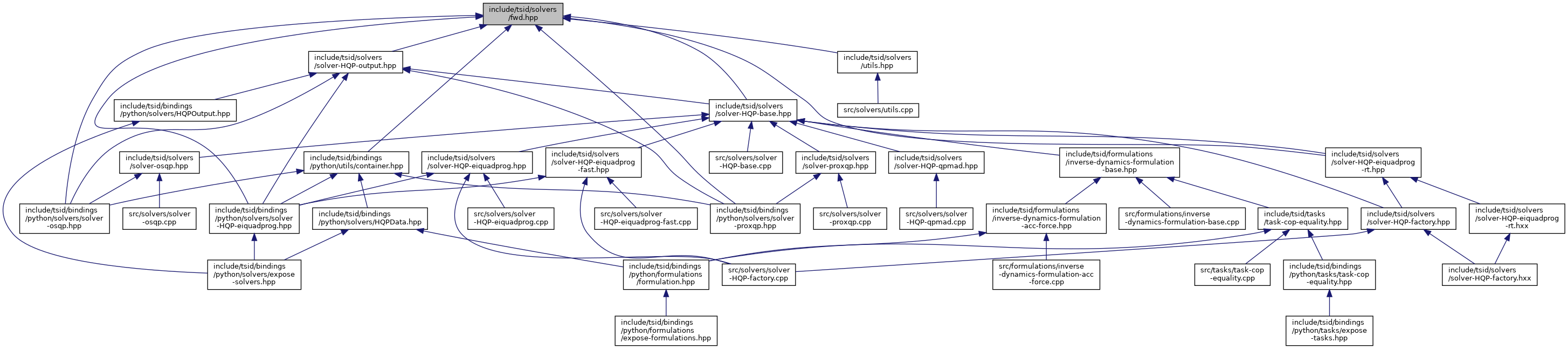
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tsid::solvers::aligned_pair< T1, T2 > |
Namespaces | |
| tsid | |
| tsid::solvers | |
Macros | |
| #define | DEFAULT_HESSIAN_REGULARIZATION 1e-8 |
Typedefs | |
| typedef pinocchio::container::aligned_vector< aligned_pair< double, std::shared_ptr< math::ConstraintBase > > > | tsid::solvers::ConstraintLevel |
| typedef pinocchio::container::aligned_vector< aligned_pair< double, std::shared_ptr< const math::ConstraintBase > > > | tsid::solvers::ConstConstraintLevel |
| typedef pinocchio::container::aligned_vector< ConstraintLevel > | tsid::solvers::HQPData |
| typedef pinocchio::container::aligned_vector< ConstConstraintLevel > | tsid::solvers::ConstHQPData |
| typedef QPDataTpl< double > | tsid::solvers::QPData |
| typedef QPDataBaseTpl< double > | tsid::solvers::QPDataBase |
| typedef QPDataQuadProgTpl< double > | tsid::solvers::QPDataQuadProg |
Functions | |
| template<typename T1 , typename T2 > | |
| aligned_pair< T1, T2 > | tsid::solvers::make_pair (const T1 &t1, const T2 &t2) |
Variables | |
| SOLVER_HQP_EIQUADPROG = 0 | |
| SOLVER_HQP_EIQUADPROG_FAST = 1 | |
| HQP_STATUS_UNKNOWN = -1 | |
| HQP_STATUS_OPTIMAL = 0 | |
| HQP_STATUS_INFEASIBLE = 1 | |
| HQP_STATUS_UNBOUNDED = 2 | |
| HQP_STATUS_MAX_ITER_REACHED = 3 | |
| class TSID_DLLAPI | tsid::solvers::SolverHQPBase |
| template<int nVars, int nEqCon, int nIneqCon> | |
| class TSID_DLLAPI | tsid::solvers::SolverHQuadProgRT |
Macro Definition Documentation
◆ DEFAULT_HESSIAN_REGULARIZATION
| #define DEFAULT_HESSIAN_REGULARIZATION 1e-8 |
Variable Documentation
◆ HQP_STATUS_INFEASIBLE
| HQP_STATUS_INFEASIBLE = 1 |
◆ HQP_STATUS_MAX_ITER_REACHED
| HQP_STATUS_MAX_ITER_REACHED = 3 |
◆ HQP_STATUS_OPTIMAL
| HQP_STATUS_OPTIMAL = 0 |
◆ HQP_STATUS_UNBOUNDED
| HQP_STATUS_UNBOUNDED = 2 |
◆ HQP_STATUS_UNKNOWN
| HQP_STATUS_UNKNOWN = -1 |
◆ SOLVER_HQP_EIQUADPROG
| SOLVER_HQP_EIQUADPROG = 0 |
◆ SOLVER_HQP_EIQUADPROG_FAST
| SOLVER_HQP_EIQUADPROG_FAST = 1 |