Definition of a robot gripper. More...
#include <hpp/model/gripper.hh>
Public Member Functions | |
| const JointPtr_t & | joint () const |
| Get joint that grip. | |
| void | joint (const JointPtr_t &joint) |
| Set joint that grip. | |
| const Transform3f & | objectPositionInJoint () const |
| Get handle position in the the Grippering joint. | |
| const std::string & | name () const |
| get name | |
| void | name (const std::string &n) |
| Set name. | |
| void | addDisabledCollision (const JointPtr_t &joint) |
| add joint to disabled collision vector | |
| void | removeDisabledCollision (JointPtr_t &joint) |
| remove joint of disabled collision vector | |
| const JointVector_t & | getDisabledCollisions () const |
| void | removeAllDisabledCollisions () |
| GripperPtr_t | clone () const |
| virtual std::ostream & | print (std::ostream &os) const |
Static Public Member Functions | |
| static GripperPtr_t | create (const std::string &name, const JointPtr_t &joint, const Transform3f &objectPositionInJoint, const JointVector_t disabledCollisions) |
| Return a shared pointer to new instance. | |
Protected Member Functions | |
| Gripper (const std::string &name, const JointPtr_t &joint, const Transform3f &objectPositionInJoint, const JointVector_t disabledCollisions) | |
| Constructor. | |
| void | init (GripperWkPtr_t weakPtr) |
Definition of a robot gripper.
This class represent a robot gripper as a frame attached to the joint of the robot that holds the gripper.
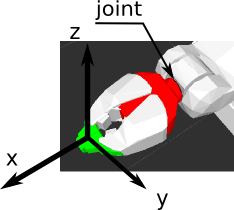
To graps a box-shaped object with small lengths along x and y, the gripper frame should coincide with the object frame.
| hpp::model::Gripper::Gripper | ( | const std::string & | name, |
| const JointPtr_t & | joint, | ||
| const Transform3f & | objectPositionInJoint, | ||
| const JointVector_t | disabledCollisions | ||
| ) | [inline, protected] |
Constructor.
| joint | joint of the robot that holds the handle, |
| objectPositionInJoint | handle position in the the grasping joint. |
| disabledCollisions | vector of joints that will be in collision with the object, so collisions detection will be disabled for those joints and the handles. |
| void hpp::model::Gripper::addDisabledCollision | ( | const JointPtr_t & | joint | ) | [inline] |
add joint to disabled collision vector
| GripperPtr_t hpp::model::Gripper::clone | ( | ) | const |
| static GripperPtr_t hpp::model::Gripper::create | ( | const std::string & | name, |
| const JointPtr_t & | joint, | ||
| const Transform3f & | objectPositionInJoint, | ||
| const JointVector_t | disabledCollisions | ||
| ) | [inline, static] |
Return a shared pointer to new instance.
| joint | joint of the robot that will hold handles, |
| objectPositionInJoint | object position in the the grasping joint. |
| disabledCollisions | vector of joints that will be in collision with the object, so collisions detection will be disabled for those joints and the handles. |
References init().
| const JointVector_t& hpp::model::Gripper::getDisabledCollisions | ( | ) | const [inline] |
| void hpp::model::Gripper::init | ( | GripperWkPtr_t | weakPtr | ) | [inline, protected] |
Referenced by create().
| const JointPtr_t& hpp::model::Gripper::joint | ( | ) | const [inline] |
Get joint that grip.
| void hpp::model::Gripper::joint | ( | const JointPtr_t & | joint | ) | [inline] |
Set joint that grip.
| const std::string& hpp::model::Gripper::name | ( | ) | const [inline] |
get name
| void hpp::model::Gripper::name | ( | const std::string & | n | ) | [inline] |
Set name.
| const Transform3f& hpp::model::Gripper::objectPositionInJoint | ( | ) | const [inline] |
Get handle position in the the Grippering joint.
| virtual std::ostream& hpp::model::Gripper::print | ( | std::ostream & | os | ) | const [virtual] |
| void hpp::model::Gripper::removeAllDisabledCollisions | ( | ) | [inline] |
| void hpp::model::Gripper::removeDisabledCollision | ( | JointPtr_t & | joint | ) | [inline] |
remove joint of disabled collision vector

