#include <iostream>#include <vector>#include <list>#include <hpp/util/debug.hh>#include <hpp/model/fwd.hh>#include <hpp/model/config.hh>#include <hpp/model/distance-result.hh>#include <hpp/model/extra-config-space.hh>#include <hpp/model/object-iterator.hh>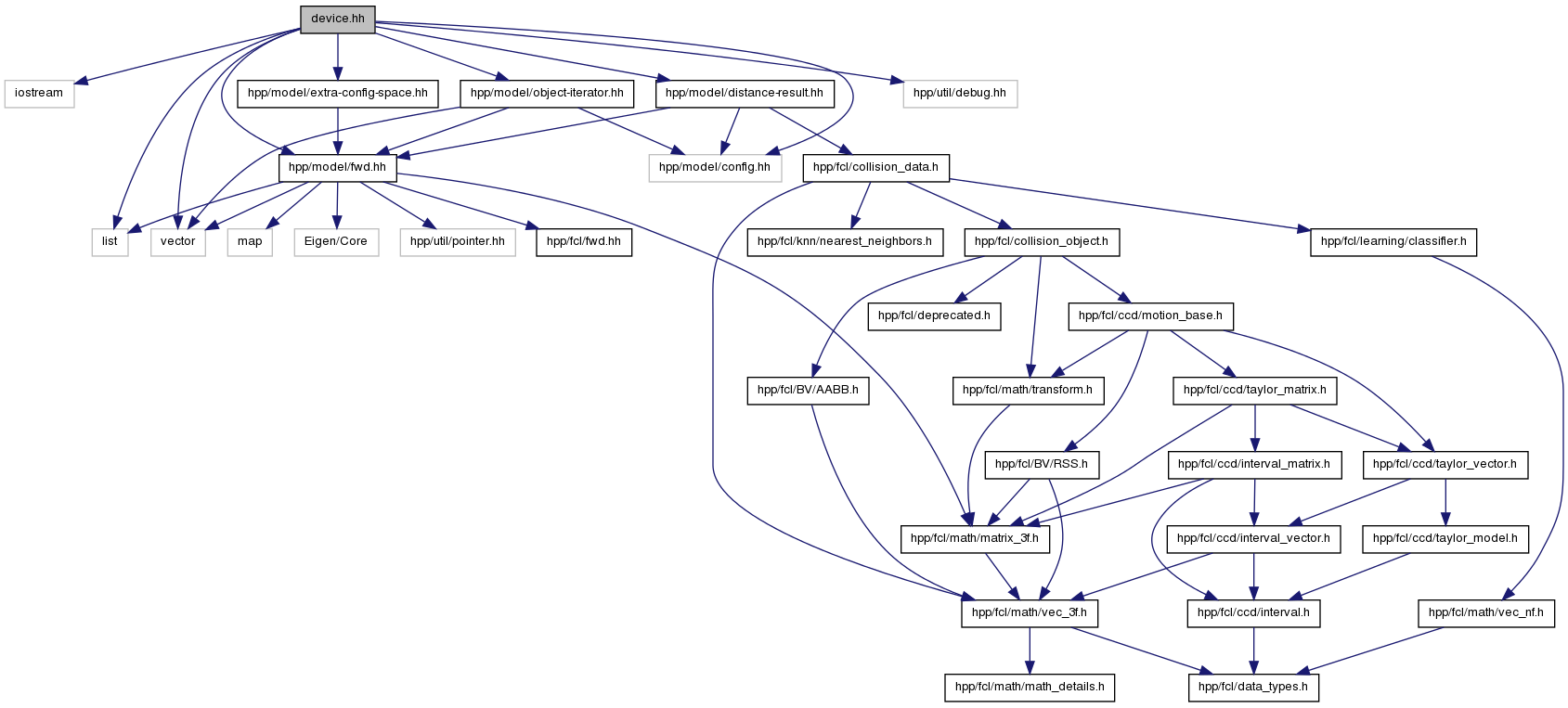
Classes | |
| class | hpp::model::Device |
| Robot with geometric and dynamic model. More... | |
Namespaces | |
| namespace | hpp |
| namespace | hpp::model |
Functions | |
| std::ostream & | hpp::model::operator<< (std::ostream &os, const hpp::model::Device &device) |

