class for GJK algorithm
More...
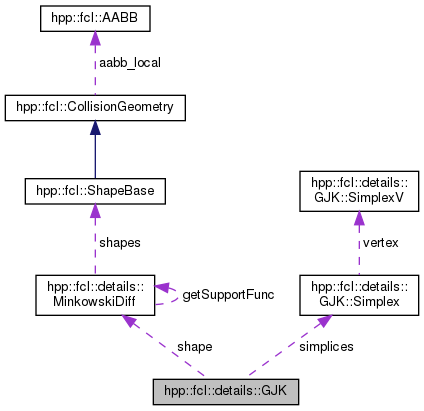
#include <hpp/fcl/narrowphase/gjk.h>
class for GJK algorithm
- Note
- The computations are performed in the frame of the first shape.
◆ vertex_id_t
◆ Status
| Enumerator |
|---|
| Valid | |
| Inside | |
| Failed | |
◆ GJK()
| hpp::fcl::details::GJK::GJK |
( |
unsigned int |
max_iterations_, |
|
|
FCL_REAL |
tolerance_ |
|
) |
| |
|
inline |
◆ encloseOrigin()
| bool hpp::fcl::details::GJK::encloseOrigin |
( |
| ) |
|
whether the simplex enclose the origin
◆ evaluate()
GJK algorithm, given the initial value guess.
◆ getClosestPoints()
Get the closest points on each object.
- Returns
- true on success
◆ getGuessFromSimplex()
| Vec3f hpp::fcl::details::GJK::getGuessFromSimplex |
( |
| ) |
const |
get the guess from current simplex
◆ getSimplex()
| Simplex* hpp::fcl::details::GJK::getSimplex |
( |
| ) |
const |
|
inline |
get the underlying simplex using in GJK, can be used for cache in next iteration
◆ getSupport()
| void hpp::fcl::details::GJK::getSupport |
( |
const Vec3f & |
d, |
|
|
bool |
dIsNormalized, |
|
|
SimplexV & |
sv |
|
) |
| const |
|
inline |
apply the support function along a direction, the result is return in sv
◆ hasClosestPoints()
| bool hpp::fcl::details::GJK::hasClosestPoints |
( |
| ) |
|
|
inline |
Tells whether the closest points are available.
◆ hasPenetrationInformation()
| bool hpp::fcl::details::GJK::hasPenetrationInformation |
( |
const MinkowskiDiff & |
shape | ) |
|
|
inline |
Tells whether the penetration information.
In such case, most indepth points and penetration depth can be retrieved from GJK. Calling EPA has an undefined behaviour.
◆ initialize()
| void hpp::fcl::details::GJK::initialize |
( |
| ) |
|
◆ setDistanceEarlyBreak()
| void hpp::fcl::details::GJK::setDistanceEarlyBreak |
( |
const FCL_REAL & |
dup | ) |
|
|
inline |
Distance threshold for early break. GJK stops when it proved the distance is more than this threshold.
- Note
- The closest points will be erroneous in this case. If you want the closest points, set this to infinity (the default).
◆ distance
| FCL_REAL hpp::fcl::details::GJK::distance |
◆ ray
| Vec3f hpp::fcl::details::GJK::ray |
◆ shape
◆ simplices
| Simplex hpp::fcl::details::GJK::simplices[2] |
The documentation for this struct was generated from the following file:
- include/hpp/fcl/narrowphase/gjk.h
 when a collision is detected and GJK cannot compute penetration informations.
when a collision is detected and GJK cannot compute penetration informations. when a collision is detected and GJK can compute penetration informations.
when a collision is detected and GJK can compute penetration informations. when there is no collision and GJK can compute the closest points.
when there is no collision and GJK can compute the closest points. when there is no collision and GJK cannot compute the closest points.
when there is no collision and GJK cannot compute the closest points. is the GJK::distance,
is the GJK::distance,  is the sum of the
is the sum of the  is the GJK::distance_upper_bound.
is the GJK::distance_upper_bound. 