A Plucker coordinate frame attached to a parent joint inside a kinematic tree.
More...
|
|
PINOCCHIO_COMPILER_DIAGNOSTIC_PUSH PINOCCHIO_COMPILER_DIAGNOSTIC_IGNORED_DEPRECECATED_DECLARATIONS | FrameTpl () |
| | Default constructor of a frame.
|
| |
| PINOCCHIO_COMPILER_DIAGNOSTIC_POP PINOCCHIO_COMPILER_DIAGNOSTIC_PUSH PINOCCHIO_COMPILER_DIAGNOSTIC_IGNORED_DEPRECECATED_DECLARATIONS | FrameTpl (const FrameTpl &other) |
| | Copy constructor. More...
|
| |
| template<typename S2 , int O2> |
| PINOCCHIO_COMPILER_DIAGNOSTIC_POP PINOCCHIO_COMPILER_DIAGNOSTIC_PUSH PINOCCHIO_COMPILER_DIAGNOSTIC_IGNORED_DEPRECECATED_DECLARATIONS | FrameTpl (const FrameTpl< S2, O2 > &other) |
| | Copy constructor by casting. More...
|
| |
| PINOCCHIO_COMPILER_DIAGNOSTIC_POP PINOCCHIO_COMPILER_DIAGNOSTIC_PUSH PINOCCHIO_COMPILER_DIAGNOSTIC_IGNORED_DEPRECECATED_DECLARATIONS | FrameTpl (const std::string &name, const JointIndex parent_joint, const FrameIndex parent_frame, const SE3 &frame_placement, const FrameType type, const Inertia &inertia=Inertia::Zero()) |
| | Builds a frame defined by its name, its joint parent id, its placement and its type. More...
|
| |
| PINOCCHIO_COMPILER_DIAGNOSTIC_POP PINOCCHIO_COMPILER_DIAGNOSTIC_PUSH PINOCCHIO_COMPILER_DIAGNOSTIC_IGNORED_DEPRECECATED_DECLARATIONS | FrameTpl (const std::string &name, const JointIndex parentJoint, const SE3 &frame_placement, const FrameType type, const Inertia &inertia=Inertia::Zero()) |
| | Builds a frame defined by its name, its joint parent id, its placement and its type. More...
|
| |
| template<typename NewScalar > |
| FrameTpl< NewScalar, Options > | cast () const |
| |
| template<typename S2 , int O2> |
| bool | operator!= (const FrameTpl< S2, O2 > &other) const |
| |
| PINOCCHIO_COMPILER_DIAGNOSTIC_POP FrameTpl< Scalar, Options > & | operator= (const FrameTpl< Scalar, Options > &other) |
| | Copy assignment operator. It needs to be user-define because references cannot be re-assigned during copy. More...
|
| |
| template<typename S2 , int O2> |
| bool | operator== (const FrameTpl< S2, O2 > &other) const |
| | Equality comparison operator. More...
|
| |
|
| ModelItem () |
| | Default constructor of ModelItem.
|
| |
| | ModelItem (const std::string &name, const JointIndex parent_joint, const FrameIndex parent_frame, const SE3 &frame_placement) |
| | Builds a kinematic element defined by its name, its joint parent id, its parent frame id and its placement. More...
|
| |
|
bool | operator== (const ModelItem &other) const |
| |
|
|
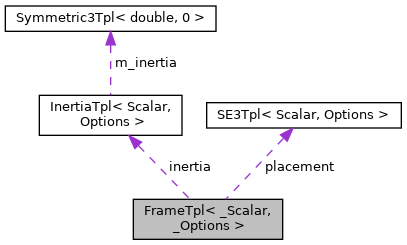
Inertia | inertia |
| | Inertia information attached to the frame. This inertia will be appended to the inertia supported by the parent joint when calling ModelTpl::addFrame. It won't be processed otherwise by the algorithms.
|
| |
|
std::string | name |
| | Name of the kinematic element.
|
| |
| PINOCCHIO_DEPRECATED JointIndex & | parent |
| | Index of the parent joint. More...
|
| |
| FrameIndex | parentFrame |
| | Index of the parent frame. More...
|
| |
|
JointIndex | parentJoint |
| | Index of the parent joint.
|
| |
|
SE3 | placement |
| | Position of kinematic element in parent joint frame.
|
| |
| PINOCCHIO_DEPRECATED FrameIndex & | previousFrame |
| | Index of the previous frame. More...
|
| |
|
FrameType | type |
| | Type of the frame.
|
| |
|
std::string | name |
| | Name of the kinematic element.
|
| |
| FrameIndex | parentFrame |
| | Index of the parent frame. More...
|
| |
|
JointIndex | parentJoint |
| | Index of the parent joint.
|
| |
|
SE3 | placement |
| | Position of kinematic element in parent joint frame.
|
| |
template<typename _Scalar, int _Options>
struct pinocchio::FrameTpl< _Scalar, _Options >
A Plucker coordinate frame attached to a parent joint inside a kinematic tree.
Definition at line 55 of file frame.hpp.
Index of the parent frame.
Parent frame may be unset (to the std::numeric_limits<FrameIndex>::max() value) as it is mostly used as a documentation of the tree, or in third-party libraries. The URDF parser of Pinocchio is setting it to the proper value according to the urdf link-joint tree. In particular, anchor joints of URDF would cause parent frame to be different to joint frame.
Definition at line 36 of file model-item.hpp.



 Public Types inherited from ModelItem< FrameTpl< _Scalar, _Options > >
Public Types inherited from ModelItem< FrameTpl< _Scalar, _Options > >