#include <hpp/fcl/collision_data.h>#include <hpp/fcl/traversal/traversal_node_base.h>#include <hpp/fcl/BV/BV_node.h>#include <hpp/fcl/BV/BV.h>#include <hpp/fcl/BVH/BVH_model.h>#include <hpp/fcl/intersect.h>#include <hpp/fcl/ccd/motion.h>#include <boost/shared_array.hpp>#include <boost/shared_ptr.hpp>#include <limits>#include <vector>#include <cassert>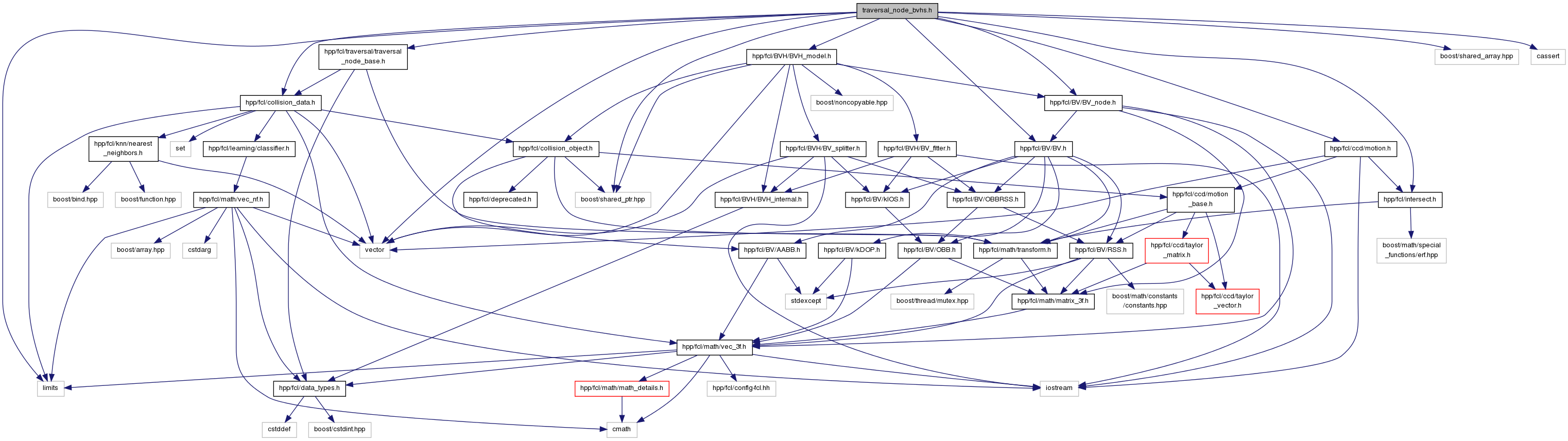
Classes | |
| class | fcl::BVHCollisionTraversalNode< BV > |
| Traversal node for collision between BVH models. More... | |
| class | fcl::MeshCollisionTraversalNode< BV > |
| Traversal node for collision between two meshes. More... | |
| class | fcl::MeshCollisionTraversalNodeOBB |
| Traversal node for collision between two meshes if their underlying BVH node is oriented node (OBB, RSS, OBBRSS, kIOS) More... | |
| class | fcl::MeshCollisionTraversalNodeRSS |
| class | fcl::MeshCollisionTraversalNodekIOS |
| class | fcl::MeshCollisionTraversalNodeOBBRSS |
| struct | fcl::BVHContinuousCollisionPair |
| Traversal node for continuous collision between BVH models. More... | |
| class | fcl::MeshContinuousCollisionTraversalNode< BV > |
| Traversal node for continuous collision between meshes. More... | |
| class | fcl::BVHDistanceTraversalNode< BV > |
| Traversal node for distance computation between BVH models. More... | |
| class | fcl::MeshDistanceTraversalNode< BV > |
| Traversal node for distance computation between two meshes. More... | |
| class | fcl::MeshDistanceTraversalNodeRSS |
| Traversal node for distance computation between two meshes if their underlying BVH node is oriented node (RSS, OBBRSS, kIOS) More... | |
| class | fcl::MeshDistanceTraversalNodekIOS |
| class | fcl::MeshDistanceTraversalNodeOBBRSS |
| class | fcl::MeshConservativeAdvancementTraversalNode< BV > |
| continuous collision node using conservative advancement. when using this default version, must refit the BVH in current configuration (R_t, T_t) into default configuration More... | |
| class | fcl::MeshConservativeAdvancementTraversalNodeRSS |
| class | fcl::MeshConservativeAdvancementTraversalNodeOBBRSS |
Namespaces | |
| fcl | |
| Main namespace. | |
| fcl::details | |
| FCL internals. | |
Functions | |
| template<typename BV > | |
| const Vec3f & | fcl::details::getBVAxis (const BV &bv, int i) |
| template<> | |
| const Vec3f & | fcl::details::getBVAxis< OBBRSS > (const OBBRSS &bv, int i) |
| template<typename BV > | |
| bool | fcl::details::meshConservativeAdvancementTraversalNodeCanStop (FCL_REAL c, FCL_REAL min_distance, FCL_REAL abs_err, FCL_REAL rel_err, FCL_REAL w, const BVHModel< BV > *model1, const BVHModel< BV > *model2, const MotionBase *motion1, const MotionBase *motion2, std::vector< ConservativeAdvancementStackData > &stack, FCL_REAL &delta_t) |

