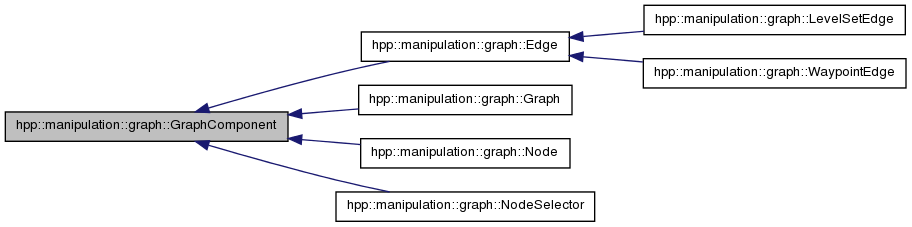
Define common methods of the graph components. More...
#include <hpp/manipulation/graph/graph-component.hh>

Public Member Functions | |
| const std::string & | name () const |
| Get the component name. | |
| void | name (const std::string &name) |
| Set the component name. | |
| int | id () const |
| Return the component id. | |
| virtual void | addNumericalConstraint (const NumericalConstraintPtr_t &numConstraint, const SizeIntervals_t &passiveDofs=SizeIntervals_t()) |
| Add core::NumericalConstraint to the component. | |
| virtual void | addNumericalConstraint (const DifferentiableFunctionPtr_t &function, const ComparisonTypePtr_t &ineq) HPP_MANIPULATION_DEPRECATED |
| Add core::DifferentiableFunction to the component. | |
| virtual void | addLockedJointConstraint (const LockedJointPtr_t &constraint) |
| Add core::LockedJoint constraint to the component. | |
| bool | insertNumericalConstraints (ConfigProjectorPtr_t &proj) const |
| Insert the numerical constraints in a ConfigProjector. | |
| bool | insertLockedJoints (ConfigProjectorPtr_t &cs) const |
| Insert the LockedJoint constraints in a ConstraintSet. | |
| const NumericalConstraints_t & | numericalConstraints () const |
| Get a reference to the NumericalConstraints_t. | |
| const LockedJoints_t & | lockedJoints () const |
| Get a reference to the LockedJoints_t. | |
| void | parentGraph (const GraphWkPtr_t &parent) |
| Set the parent graph. | |
| virtual std::ostream & | dotPrint (std::ostream &os, dot::DrawingAttributes da=dot::DrawingAttributes()) const |
| Print the component in DOT language. | |
Static Public Member Functions | |
| static GraphComponentWkPtr_t | get (int id) |
| Get the component by its ID. | |
Protected Member Functions | |
| void | init (const GraphComponentWkPtr_t &weak) |
| Initialize the component. | |
| GraphComponent () | |
| virtual std::ostream & | print (std::ostream &os) const |
| Print the object in a stream. | |
| virtual void | populateTooltip (dot::Tooltip &tp) const |
| Populate DrawingAttributes tooltip. | |
Protected Attributes | |
| NumericalConstraints_t | numericalConstraints_ |
| Stores the numerical constraints. | |
| std::vector< SizeIntervals_t > | passiveDofs_ |
| Stores the passive dofs for each numerical constraints. | |
| LockedJoints_t | lockedJoints_ |
| List of LockedJoint constraints. | |
| GraphWkPtr_t | graph_ |
| A weak pointer to the parent graph. | |
Friends | |
| std::ostream & | operator<< (std::ostream &, const GraphComponent &) |
Define common methods of the graph components.
| hpp::manipulation::graph::GraphComponent::GraphComponent | ( | ) | [inline, protected] |
| virtual void hpp::manipulation::graph::GraphComponent::addLockedJointConstraint | ( | const LockedJointPtr_t & | constraint | ) | [virtual] |
Add core::LockedJoint constraint to the component.
| virtual void hpp::manipulation::graph::GraphComponent::addNumericalConstraint | ( | const NumericalConstraintPtr_t & | numConstraint, |
| const SizeIntervals_t & | passiveDofs = SizeIntervals_t() |
||
| ) | [virtual] |
Add core::NumericalConstraint to the component.
| passiveDofs | see ConfigProjector::addNumericalConstraint |
Reimplemented in hpp::manipulation::graph::NodeSelector.
| virtual void hpp::manipulation::graph::GraphComponent::addNumericalConstraint | ( | const DifferentiableFunctionPtr_t & | function, |
| const ComparisonTypePtr_t & | ineq | ||
| ) | [virtual] |
Add core::DifferentiableFunction to the component.
| virtual std::ostream& hpp::manipulation::graph::GraphComponent::dotPrint | ( | std::ostream & | os, |
| dot::DrawingAttributes | da = dot::DrawingAttributes() |
||
| ) | const [virtual] |
Print the component in DOT language.
Reimplemented in hpp::manipulation::graph::LevelSetEdge, hpp::manipulation::graph::WaypointEdge, hpp::manipulation::graph::Node, hpp::manipulation::graph::Edge, hpp::manipulation::graph::Graph, and hpp::manipulation::graph::NodeSelector.
| static GraphComponentWkPtr_t hpp::manipulation::graph::GraphComponent::get | ( | int | id | ) | [static] |
Get the component by its ID.
The validity of the GraphComponent is not checked.
| int hpp::manipulation::graph::GraphComponent::id | ( | ) | const |
Return the component id.
| void hpp::manipulation::graph::GraphComponent::init | ( | const GraphComponentWkPtr_t & | weak | ) | [protected] |
Initialize the component.
| bool hpp::manipulation::graph::GraphComponent::insertLockedJoints | ( | ConfigProjectorPtr_t & | cs | ) | const |
Insert the LockedJoint constraints in a ConstraintSet.
| bool hpp::manipulation::graph::GraphComponent::insertNumericalConstraints | ( | ConfigProjectorPtr_t & | proj | ) | const |
Insert the numerical constraints in a ConfigProjector.
| const LockedJoints_t& hpp::manipulation::graph::GraphComponent::lockedJoints | ( | ) | const |
Get a reference to the LockedJoints_t.
| const std::string& hpp::manipulation::graph::GraphComponent::name | ( | ) | const |
Get the component name.
| void hpp::manipulation::graph::GraphComponent::name | ( | const std::string & | name | ) |
Set the component name.
| const NumericalConstraints_t& hpp::manipulation::graph::GraphComponent::numericalConstraints | ( | ) | const |
Get a reference to the NumericalConstraints_t.
| void hpp::manipulation::graph::GraphComponent::parentGraph | ( | const GraphWkPtr_t & | parent | ) |
Set the parent graph.
| virtual void hpp::manipulation::graph::GraphComponent::populateTooltip | ( | dot::Tooltip & | tp | ) | const [protected, virtual] |
Populate DrawingAttributes tooltip.
Reimplemented in hpp::manipulation::graph::LevelSetEdge, and hpp::manipulation::graph::Node.
| virtual std::ostream& hpp::manipulation::graph::GraphComponent::print | ( | std::ostream & | os | ) | const [protected, virtual] |
Print the object in a stream.
Reimplemented in hpp::manipulation::graph::LevelSetEdge, hpp::manipulation::graph::WaypointEdge, hpp::manipulation::graph::Node, hpp::manipulation::graph::Edge, hpp::manipulation::graph::Graph, and hpp::manipulation::graph::NodeSelector.
| std::ostream& operator<< | ( | std::ostream & | , |
| const GraphComponent & | |||
| ) | [friend] |
GraphWkPtr_t hpp::manipulation::graph::GraphComponent::graph_ [protected] |
A weak pointer to the parent graph.
List of LockedJoint constraints.
Stores the numerical constraints.
std::vector<SizeIntervals_t> hpp::manipulation::graph::GraphComponent::passiveDofs_ [protected] |
Stores the passive dofs for each numerical constraints.

