#include <cstddef>#include <hpp/fcl/math/transform.h>#include <hpp/model/config.hh>#include <hpp/model/fwd.hh>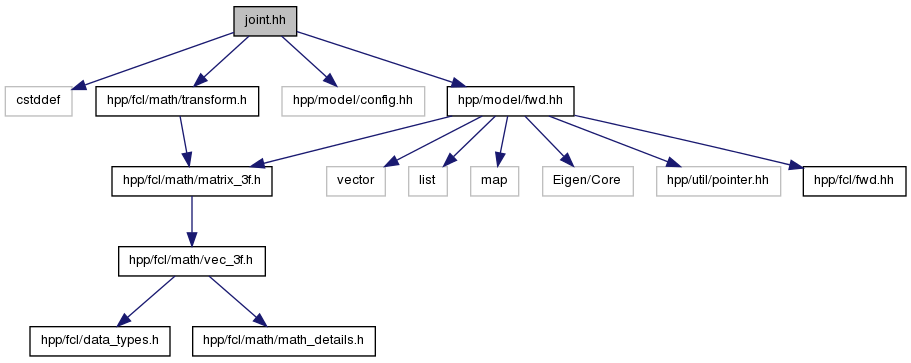
Classes | |
| class | hpp::model::Joint |
| Robot joint. More... | |
| class | hpp::model::JointAnchor |
| Anchor Joint. More... | |
| class | hpp::model::JointSO3 |
| Spherical Joint. More... | |
| class | hpp::model::JointRotation |
| Rotation Joint. More... | |
| class | hpp::model::jointRotation::UnBounded |
| Rotation about an axis without bound. More... | |
| class | hpp::model::jointRotation::Bounded |
| Rotation about an axis with bound. More... | |
| class | hpp::model::JointTranslation< dimension > |
| Translation Joint. More... | |
Namespaces | |
| namespace | hpp |
| namespace | hpp::model |
| namespace | hpp::model::jointRotation |
| namespace | fcl |
Functions | |
| std::ostream & | hpp::model::operator<< (std::ostream &os, const hpp::model::Joint &joint) |
| std::ostream & | fcl::operator<< (std::ostream &os, const fcl::Transform3f &trans) |

