Loading...
Searching...
No Matches
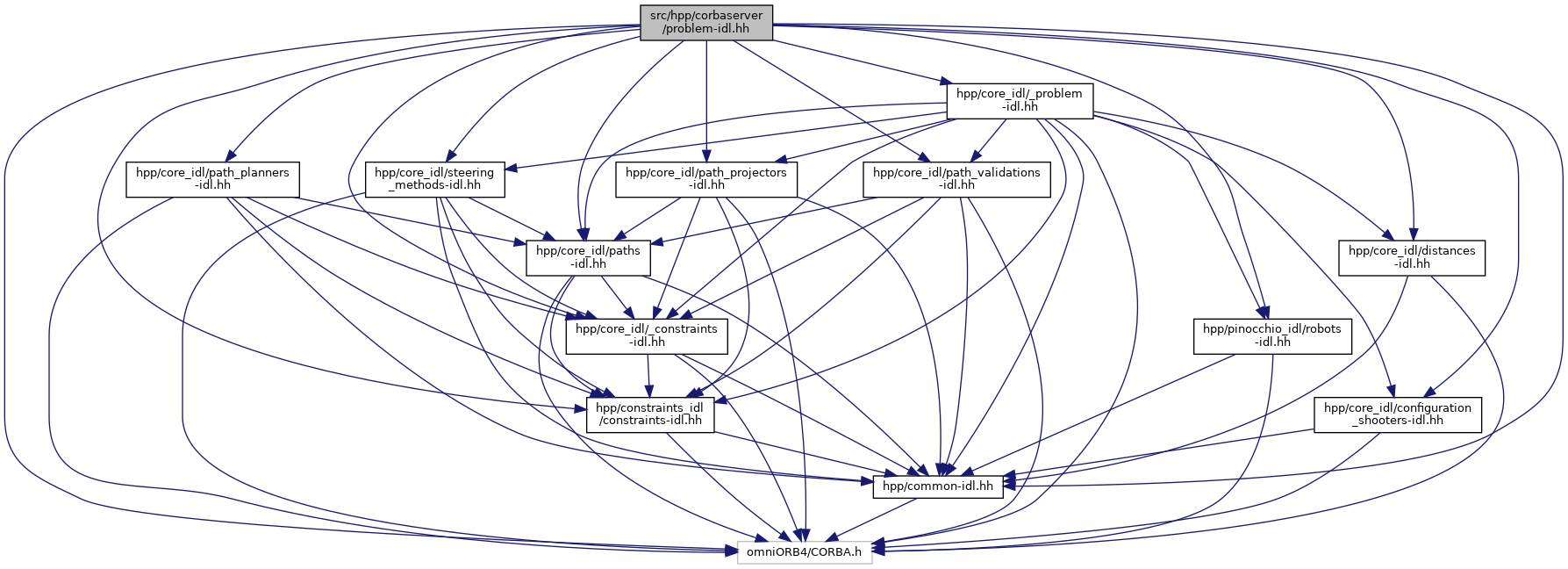
#include <omniORB4/CORBA.h>#include <hpp/common-idl.hh>#include <hpp/constraints_idl/constraints-idl.hh>#include <hpp/core_idl/distances-idl.hh>#include <hpp/core_idl/paths-idl.hh>#include <hpp/core_idl/_constraints-idl.hh>#include <hpp/core_idl/steering_methods-idl.hh>#include <hpp/core_idl/path_planners-idl.hh>#include <hpp/core_idl/path_projectors-idl.hh>#include <hpp/core_idl/path_validations-idl.hh>#include <hpp/core_idl/_problem-idl.hh>#include <hpp/pinocchio_idl/robots-idl.hh>#include <hpp/core_idl/configuration_shooters-idl.hh>
Include dependency graph for problem-idl.hh:
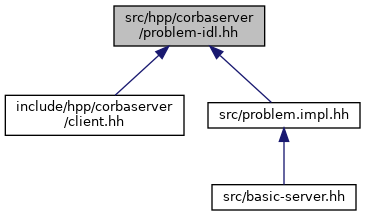
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Problem_Helper |
| class | Problem |
| class | _objref_Problem |
| class | _pof_Problem |
| class | _impl_Problem |
Macros | |
| #define | USE_stub_in_nt_dll_NOT_DEFINED_problem |
| #define | USE_core_stub_in_nt_dll_NOT_DEFINED_problem |
| #define | USE_dyn_stub_in_nt_dll_NOT_DEFINED_problem |
| #define | __common_hh_EXTERNAL_GUARD__ |
| #define | __constraints_hh_EXTERNAL_GUARD__ |
| #define | __distances_hh_EXTERNAL_GUARD__ |
| #define | __paths_hh_EXTERNAL_GUARD__ |
| #define | ____constraints_hh_EXTERNAL_GUARD__ |
| #define | __steering__methods_hh_EXTERNAL_GUARD__ |
| #define | __path__planners_hh_EXTERNAL_GUARD__ |
| #define | __path__projectors_hh_EXTERNAL_GUARD__ |
| #define | __path__validations_hh_EXTERNAL_GUARD__ |
| #define | ____problem_hh_EXTERNAL_GUARD__ |
| #define | __robots_hh_EXTERNAL_GUARD__ |
| #define | __configuration__shooters_hh_EXTERNAL_GUARD__ |
| #define | _core_attr |
| #define | _dyn_attr |
| #define | __hpp_mcorbaserver_mProblem__ |
Typedefs | |
| typedef _objref_Problem * | Problem_ptr |
| typedef Problem_ptr | ProblemRef |
| typedef _CORBA_ObjRef_Var< _objref_Problem, Problem_Helper > | Problem_var |
| typedef _CORBA_ObjRef_OUT_arg< _objref_Problem, Problem_Helper > | Problem_out |
Macro Definition Documentation
◆ ____constraints_hh_EXTERNAL_GUARD__
| #define ____constraints_hh_EXTERNAL_GUARD__ |
◆ ____problem_hh_EXTERNAL_GUARD__
| #define ____problem_hh_EXTERNAL_GUARD__ |
◆ __common_hh_EXTERNAL_GUARD__
| #define __common_hh_EXTERNAL_GUARD__ |
◆ __configuration__shooters_hh_EXTERNAL_GUARD__
| #define __configuration__shooters_hh_EXTERNAL_GUARD__ |
◆ __constraints_hh_EXTERNAL_GUARD__
| #define __constraints_hh_EXTERNAL_GUARD__ |
◆ __distances_hh_EXTERNAL_GUARD__
| #define __distances_hh_EXTERNAL_GUARD__ |
◆ __hpp_mcorbaserver_mProblem__
| #define __hpp_mcorbaserver_mProblem__ |
◆ __path__planners_hh_EXTERNAL_GUARD__
| #define __path__planners_hh_EXTERNAL_GUARD__ |
◆ __path__projectors_hh_EXTERNAL_GUARD__
| #define __path__projectors_hh_EXTERNAL_GUARD__ |
◆ __path__validations_hh_EXTERNAL_GUARD__
| #define __path__validations_hh_EXTERNAL_GUARD__ |
◆ __paths_hh_EXTERNAL_GUARD__
| #define __paths_hh_EXTERNAL_GUARD__ |
◆ __robots_hh_EXTERNAL_GUARD__
| #define __robots_hh_EXTERNAL_GUARD__ |
◆ __steering__methods_hh_EXTERNAL_GUARD__
| #define __steering__methods_hh_EXTERNAL_GUARD__ |
◆ _core_attr
| #define _core_attr |
◆ _dyn_attr
| #define _dyn_attr |
◆ USE_core_stub_in_nt_dll_NOT_DEFINED_problem
| #define USE_core_stub_in_nt_dll_NOT_DEFINED_problem |
◆ USE_dyn_stub_in_nt_dll_NOT_DEFINED_problem
| #define USE_dyn_stub_in_nt_dll_NOT_DEFINED_problem |
◆ USE_stub_in_nt_dll_NOT_DEFINED_problem
| #define USE_stub_in_nt_dll_NOT_DEFINED_problem |
Typedef Documentation
◆ Problem_out
| typedef _CORBA_ObjRef_OUT_arg<_objref_Problem,Problem_Helper > Problem_out |
◆ Problem_ptr
| typedef _objref_Problem* Problem_ptr |
◆ Problem_var
| typedef _CORBA_ObjRef_Var<_objref_Problem, Problem_Helper> Problem_var |
◆ ProblemRef
| typedef Problem_ptr ProblemRef |