|
|
| MotionRef (typename PINOCCHIO_EIGEN_REF_TYPE(Vector6ArgType) v_like) |
| |
|
template<typename S1 , int O1> |
| MotionRef & | __mequ__ (const MotionTpl< S1, O1 > &v) |
| |
|
template<typename Vector6Like > |
| MotionRef & | __mequ__ (const MotionRef< Vector6ArgType > &v) |
| |
|
template<typename S1 , int O1> |
| MotionPlain | __minus__ (const MotionTpl< S1, O1 > &v) const |
| |
|
template<typename Vector6Like > |
| MotionPlain | __minus__ (const MotionRef< Vector6ArgType > &v) const |
| |
|
template<typename OtherScalar > |
| MotionPlain | __mult__ (const OtherScalar &alpha) const |
| |
|
template<typename S1 , int O1> |
| MotionRef & | __pequ__ (const MotionTpl< S1, O1 > &v) |
| |
|
template<typename Vector6Like > |
| MotionRef & | __pequ__ (const MotionRef< Vector6ArgType > &v) |
| |
|
template<typename S1 , int O1> |
| MotionPlain | __plus__ (const MotionTpl< S1, O1 > &v) const |
| |
|
template<typename Vector6Like > |
| MotionPlain | __plus__ (const MotionRef< Vector6ArgType > &v) const |
| |
|
ConstAngularType | angular_impl () const |
| |
|
AngularType | angular_impl () |
| |
|
template<typename V3 > |
| void | angular_impl (const Eigen::MatrixBase< V3 > &w) |
| |
|
ConstLinearType | linear_impl () const |
| |
|
LinearType | linear_impl () |
| |
|
template<typename V3 > |
| void | linear_impl (const Eigen::MatrixBase< V3 > &v) |
| |
|
| MOTION_TYPEDEF_TPL (MotionRef) |
| |
|
PlainReturnType | plain () const |
| |
|
MotionRef & | ref () |
| |
|
ToVectorConstReturnType | toVector_impl () const |
| |
|
ToVectorReturnType | toVector_impl () |
| |
|
MotionPlain | __div__ (const OtherScalar &alpha) const |
| |
|
MotionRef< Vector6ArgType > & | __mequ__ (const MotionDense< M1 > &v) |
| |
|
MotionPlain | __minus__ (const MotionDense< M1 > &v) const |
| |
|
MotionPlain | __mult__ (const OtherScalar &alpha) const |
| |
|
MotionPlain | __opposite__ () const |
| |
|
MotionRef< Vector6ArgType > & | __pequ__ (const MotionDense< M1 > &v) |
| |
|
MotionPlain | __plus__ (const MotionDense< M1 > &v) const |
| |
|
MotionAlgebraAction< D, MotionRef< Vector6ArgType > >::ReturnType | cross_impl (const D &d) const |
| |
|
void | disp_impl (std::ostream &os) const |
| |
|
Scalar | dot (const ForceBase< F1 > &phi) const |
| |
|
bool | isApprox (const MotionDense< M2 > &m2, const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| |
|
bool | isApprox_impl (const MotionDense< D2 > &m2, const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| |
|
bool | isEqual_impl (const MotionDense< D2 > &other) const |
| |
|
bool | isEqual_impl (const MotionBase< D2 > &other) const |
| |
|
bool | isZero_impl (const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| |
|
| MOTION_TYPEDEF_TPL (MotionRef< Vector6ArgType >) |
| |
|
void | motionAction (const MotionDense< M1 > &v, MotionDense< M2 > &mout) const |
| |
|
MotionPlain | motionAction (const MotionDense< M1 > &v) const |
| |
|
MotionPlain | operator+ (const MotionDense< M1 > &v) const |
| |
|
MotionRef< Vector6ArgType > & | operator+= (const MotionDense< M1 > &v) |
| |
|
MotionRef< Vector6ArgType > & | operator+= (const MotionBase< M1 > &v) |
| |
|
MotionPlain | operator- () const |
| |
|
MotionPlain | operator- (const MotionDense< M1 > &v) const |
| |
|
MotionRef< Vector6ArgType > & | operator-= (const MotionDense< M1 > &v) |
| |
|
MotionRef< Vector6ArgType > & | operator= (const MotionDense< D2 > &other) |
| |
|
MotionRef< Vector6ArgType > & | operator= (const MotionBase< D2 > &other) |
| |
|
MotionRef< Vector6ArgType > & | operator= (const Eigen::MatrixBase< V6 > &v) |
| |
| MotionRefType | ref () |
| |
|
void | se3Action_impl (const SE3Tpl< S2, O2 > &m, MotionDense< D2 > &v) const |
| |
|
SE3GroupAction< MotionRef< Vector6ArgType > >::ReturnType | se3Action_impl (const SE3Tpl< S2, O2 > &m) const |
| |
|
void | se3ActionInverse_impl (const SE3Tpl< S2, O2 > &m, MotionDense< D2 > &v) const |
| |
|
SE3GroupAction< MotionRef< Vector6ArgType > >::ReturnType | se3ActionInverse_impl (const SE3Tpl< S2, O2 > &m) const |
| |
|
MotionRef< Vector6ArgType > & | setRandom () |
| |
|
MotionRef< Vector6ArgType > & | setZero () |
| |
|
ActionMatrixType | toActionMatrix_impl () const |
| |
|
ActionMatrixType | toDualActionMatrix_impl () const |
| |
|
ConstAngularType | angular () const |
| |
|
AngularType | angular () |
| |
|
void | angular (const Eigen::MatrixBase< V3Like > &w) |
| |
|
MotionAlgebraAction< OtherSpatialType, MotionRef< Vector6ArgType > >::ReturnType | cross (const OtherSpatialType &d) const |
| |
|
MotionRef< Vector6ArgType > & | derived () |
| |
|
const MotionRef< Vector6ArgType > & | derived () const |
| |
|
void | disp (std::ostream &os) const |
| |
|
Scalar | dot (const ForceDense< ForceDerived > &f) const |
| |
|
bool | isApprox (const MotionRef< Vector6ArgType > &other, const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| |
|
bool | isZero (const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| |
|
ConstLinearType | linear () const |
| |
|
LinearType | linear () |
| |
|
void | linear (const Eigen::MatrixBase< V3Like > &v) |
| |
|
| MOTION_TYPEDEF_TPL (MotionRef< Vector6ArgType >) |
| |
|
| operator Matrix6 () const |
| |
|
| operator PlainReturnType () const |
| |
|
| operator Vector6 () const |
| |
|
bool | operator!= (const MotionBase< M2 > &other) const |
| |
|
internal::RHSScalarMultiplication< MotionRef< Vector6ArgType >, OtherScalar >::ReturnType | operator* (const OtherScalar &alpha) const |
| |
|
MotionRef< Vector6ArgType > | operator+ (const MotionBase< MotionRef< Vector6ArgType > > &v) const |
| |
|
MotionRef< Vector6ArgType > & | operator+= (const MotionBase< MotionRef< Vector6ArgType > > &v) |
| |
|
MotionRef< Vector6ArgType > | operator- () const |
| |
|
MotionRef< Vector6ArgType > | operator- (const MotionBase< MotionRef< Vector6ArgType > > &v) const |
| |
|
MotionRef< Vector6ArgType > & | operator-= (const MotionBase< MotionRef< Vector6ArgType > > &v) |
| |
|
MotionRef< Vector6ArgType > | operator/ (const OtherScalar &alpha) const |
| |
|
bool | operator== (const MotionBase< M2 > &other) const |
| |
|
PlainReturnType | plain () const |
| |
|
SE3GroupAction< MotionRef< Vector6ArgType > >::ReturnType | se3Action (const SE3Tpl< S2, O2 > &m) const |
| |
|
SE3GroupAction< MotionRef< Vector6ArgType > >::ReturnType | se3ActionInverse (const SE3Tpl< S2, O2 > &m) const |
| |
|
void | setZero () |
| |
|
ActionMatrixType | toActionMatrix () const |
| |
|
ActionMatrixType | toDualActionMatrix () const |
| |
|
ToVectorConstReturnType | toVector () const |
| |
|
ToVectorReturnType | toVector () |
| |
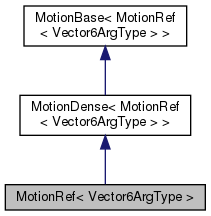
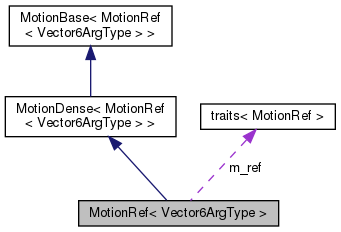
template<typename Vector6ArgType>
class pinocchio::MotionRef< Vector6ArgType >
Definition at line 42 of file fwd.hpp.



 Public Types inherited from MotionDense< MotionRef< Vector6ArgType > >
Public Types inherited from MotionDense< MotionRef< Vector6ArgType > > 1.8.13
1.8.13