Loading...
Searching...
No Matches
symbolic-calculus.hh File Reference
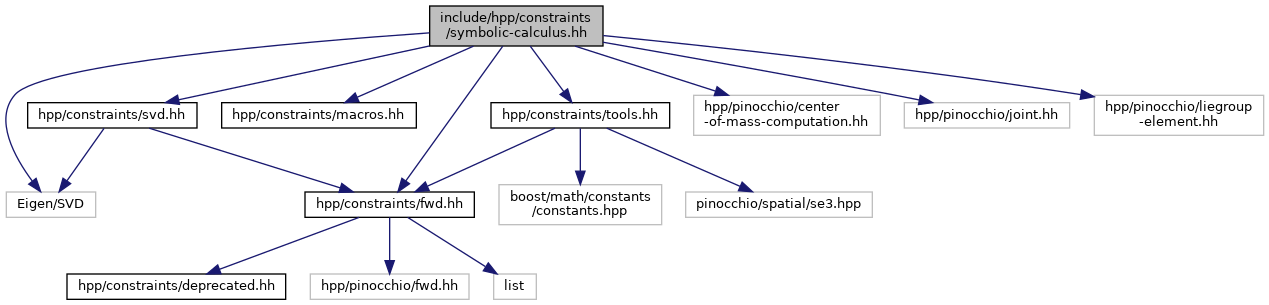
#include <Eigen/SVD>#include <hpp/constraints/fwd.hh>#include <hpp/constraints/macros.hh>#include <hpp/constraints/svd.hh>#include <hpp/constraints/tools.hh>#include <hpp/pinocchio/center-of-mass-computation.hh>#include <hpp/pinocchio/joint.hh>#include <hpp/pinocchio/liegroup-element.hh>
Include dependency graph for symbolic-calculus.hh:
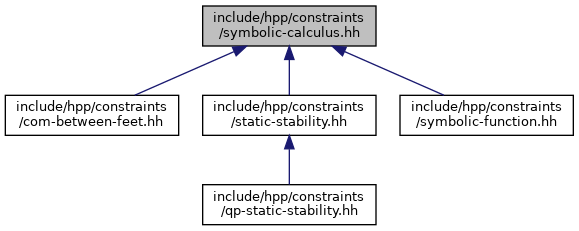
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | hpp |
| namespace | hpp::constraints |
Macros | |
| #define | HPP_CONSTRAINTS_CB_REF shared_ptr |
| #define | HPP_CONSTRAINTS_CB_WKREF shared_ptr |
| #define | HPP_CONSTRAINTS_CB_DEFINE_OPERATOR1(op, InType, OutType) |
| #define | HPP_CONSTRAINTS_CB_FRIEND_OPERATOR1(op, InType, OutType) |
| #define | HPP_CONSTRAINTS_CB_DEFINE_OPERATOR2(op, OutType) |
| #define | HPP_CONSTRAINTS_CB_FRIEND_OPERATOR2(op, OutType) |
| #define | HPP_CONSTRAINTS_CB_CREATE1(Class, Arg0Type) |
| #define | HPP_CONSTRAINTS_CB_CREATE2(Class, Arg0Type, Arg1Type) |
| #define | HPP_CONSTRAINTS_CB_CREATE3(Class, Arg0Type, Arg1Type, Arg2Type) |
Typedefs | |
| typedef eigen::matrix3_t | hpp::constraints::CrossMatrix |
| typedef Eigen::Matrix< value_type, 1, Eigen::Dynamic, Eigen::RowMajor > | hpp::constraints::RowJacobianMatrix |
| typedef Eigen::Matrix< value_type, 3, Eigen::Dynamic, Eigen::RowMajor > | hpp::constraints::JacobianMatrix |
Macro Definition Documentation
◆ HPP_CONSTRAINTS_CB_CREATE1
| #define HPP_CONSTRAINTS_CB_CREATE1 | ( | Class, | |
| Arg0Type | |||
| ) |
Value:
static typename Traits<Class>::Ptr_t create(Arg0Type arg0) { \
typename Traits<Class>::Ptr_t ptr(new Class(arg0)); \
ptr->init(ptr); \
return ptr; \
}
◆ HPP_CONSTRAINTS_CB_CREATE2
| #define HPP_CONSTRAINTS_CB_CREATE2 | ( | Class, | |
| Arg0Type, | |||
| Arg1Type | |||
| ) |
Value:
static typename Traits<Class>::Ptr_t create(Arg0Type arg0, Arg1Type arg1) { \
typename Traits<Class>::Ptr_t ptr(new Class(arg0, arg1)); \
ptr->init(ptr); \
return ptr; \
}
◆ HPP_CONSTRAINTS_CB_CREATE3
| #define HPP_CONSTRAINTS_CB_CREATE3 | ( | Class, | |
| Arg0Type, | |||
| Arg1Type, | |||
| Arg2Type | |||
| ) |
Value:
static typename Traits<Class>::Ptr_t create(Arg0Type arg0, Arg1Type arg1, \
Arg2Type arg2) { \
typename Traits<Class>::Ptr_t ptr(new Class(arg0, arg1, arg2)); \
ptr->init(ptr); \
return ptr; \
}
◆ HPP_CONSTRAINTS_CB_DEFINE_OPERATOR1
| #define HPP_CONSTRAINTS_CB_DEFINE_OPERATOR1 | ( | op, | |
| InType, | |||
| OutType | |||
| ) |
Value:
template <typename RhsType> \
typename Traits<OutType<RhsType> >::Ptr_t op( \
const InType& lhs, const HPP_CONSTRAINTS_CB_REF<RhsType>& rhs) { \
typedef OutType<RhsType> Op_t; \
return Op_t::create(lhs, rhs); \
}
◆ HPP_CONSTRAINTS_CB_DEFINE_OPERATOR2
| #define HPP_CONSTRAINTS_CB_DEFINE_OPERATOR2 | ( | op, | |
| OutType | |||
| ) |
Value:
template <typename LhsType, typename RhsType> \
typename Traits<OutType<LhsType, RhsType> >::Ptr_t op( \
const HPP_CONSTRAINTS_CB_REF<LhsType>& lhs, \
const HPP_CONSTRAINTS_CB_REF<RhsType>& rhs) { \
typedef OutType<LhsType, RhsType> Op_t; \
return Op_t::create(lhs, rhs); \
}
◆ HPP_CONSTRAINTS_CB_FRIEND_OPERATOR1
| #define HPP_CONSTRAINTS_CB_FRIEND_OPERATOR1 | ( | op, | |
| InType, | |||
| OutType | |||
| ) |
Value:
template <typename RhsType> \
friend typename Traits<OutType<RhsType> >::Ptr_t op( \
const InType& lhs, const HPP_CONSTRAINTS_CB_REF<RhsType>& rhs);
◆ HPP_CONSTRAINTS_CB_FRIEND_OPERATOR2
| #define HPP_CONSTRAINTS_CB_FRIEND_OPERATOR2 | ( | op, | |
| OutType | |||
| ) |
Value:
template <typename LhsType, typename RhsType> \
friend typename Traits<OutType<LhsType, RhsType> >::Ptr_t op( \
const HPP_CONSTRAINTS_CB_REF<LhsType>& lhs, \
const HPP_CONSTRAINTS_CB_REF<RhsType>& rhs);
◆ HPP_CONSTRAINTS_CB_REF
| #define HPP_CONSTRAINTS_CB_REF shared_ptr |
◆ HPP_CONSTRAINTS_CB_WKREF
| #define HPP_CONSTRAINTS_CB_WKREF shared_ptr |