Loading...
Searching...
No Matches
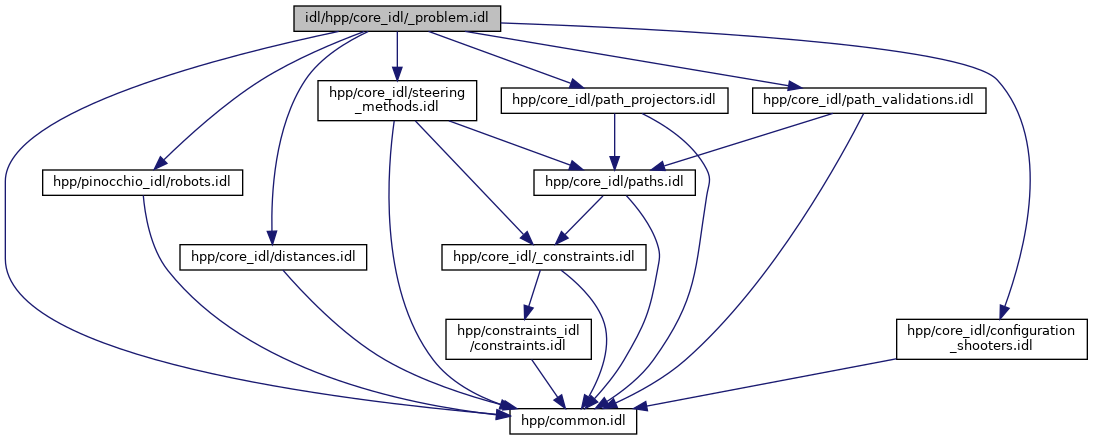
import <hpp/common.idl;import <hpp/pinocchio_idl/robots.idl;import <hpp/core_idl/distances.idl;import <hpp/core_idl/steering_methods.idl;import <hpp/core_idl/path_projectors.idl;import <hpp/core_idl/path_validations.idl;import <hpp/core_idl/configuration_shooters.idl;
Include dependency graph for _problem.idl:
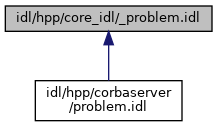
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| interface | hpp::core_idl::Problem |
Modules | |
| namespace | hpp |
| Implement CORBA interface `‘Obstacle’'. | |
| module | hpp::pinocchio_idl |
| module | hpp::core_idl |