Demonstrations
Manipulation planning with visual servoing
Pyrène plans collision free and balanced motions to swap a box upside-down on a table. The motion is planning using HPP software platform, and executed by the Stack of Tasks. Hierarchical task based controllers are automatically generated for each segment of the motion. Grasp and placement motions use visual servoing to improve the accuracy of the task.
Manipulation Planning
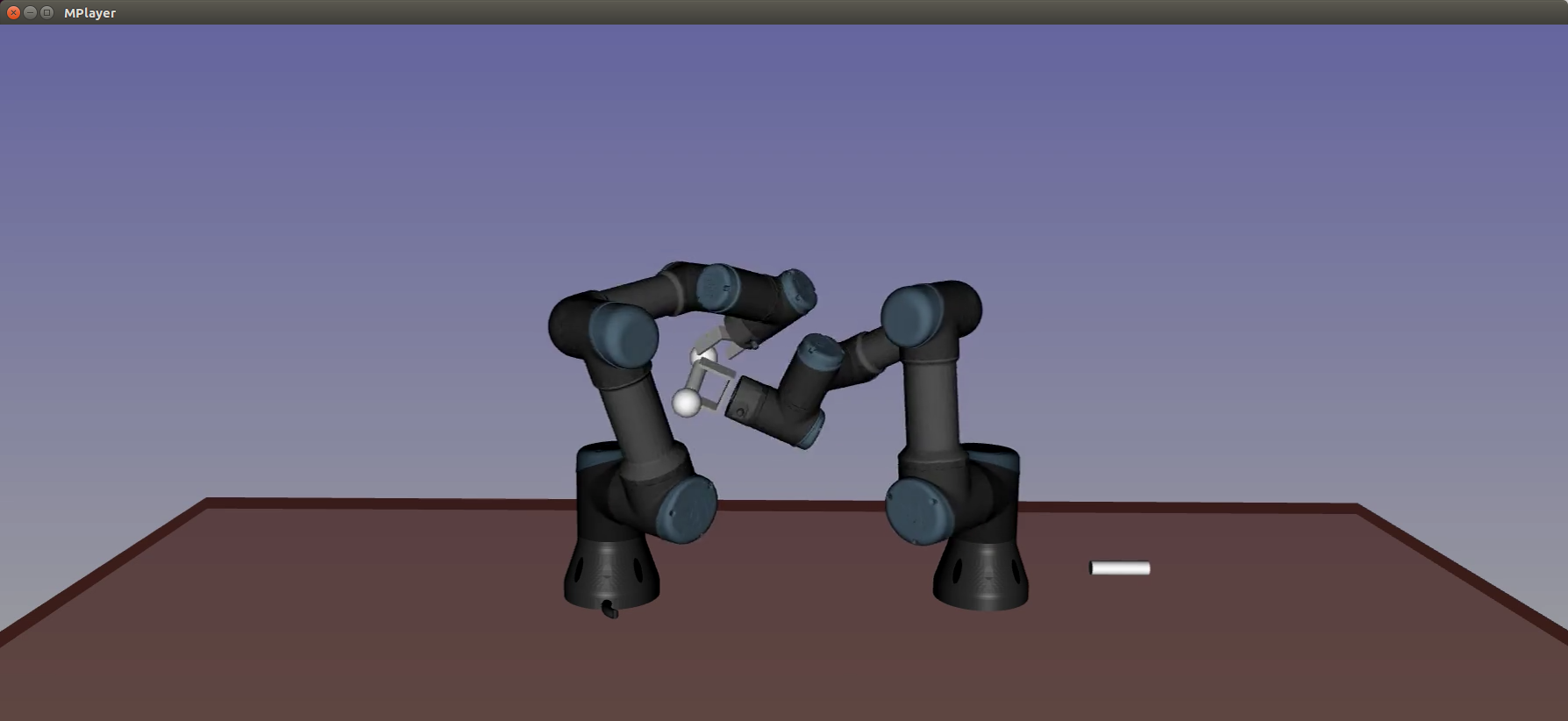
HPP software platform implements manipulation planning algorithms. In this example, two robots collaborate to assemble a magnetic construction set.
Manipulation Planning
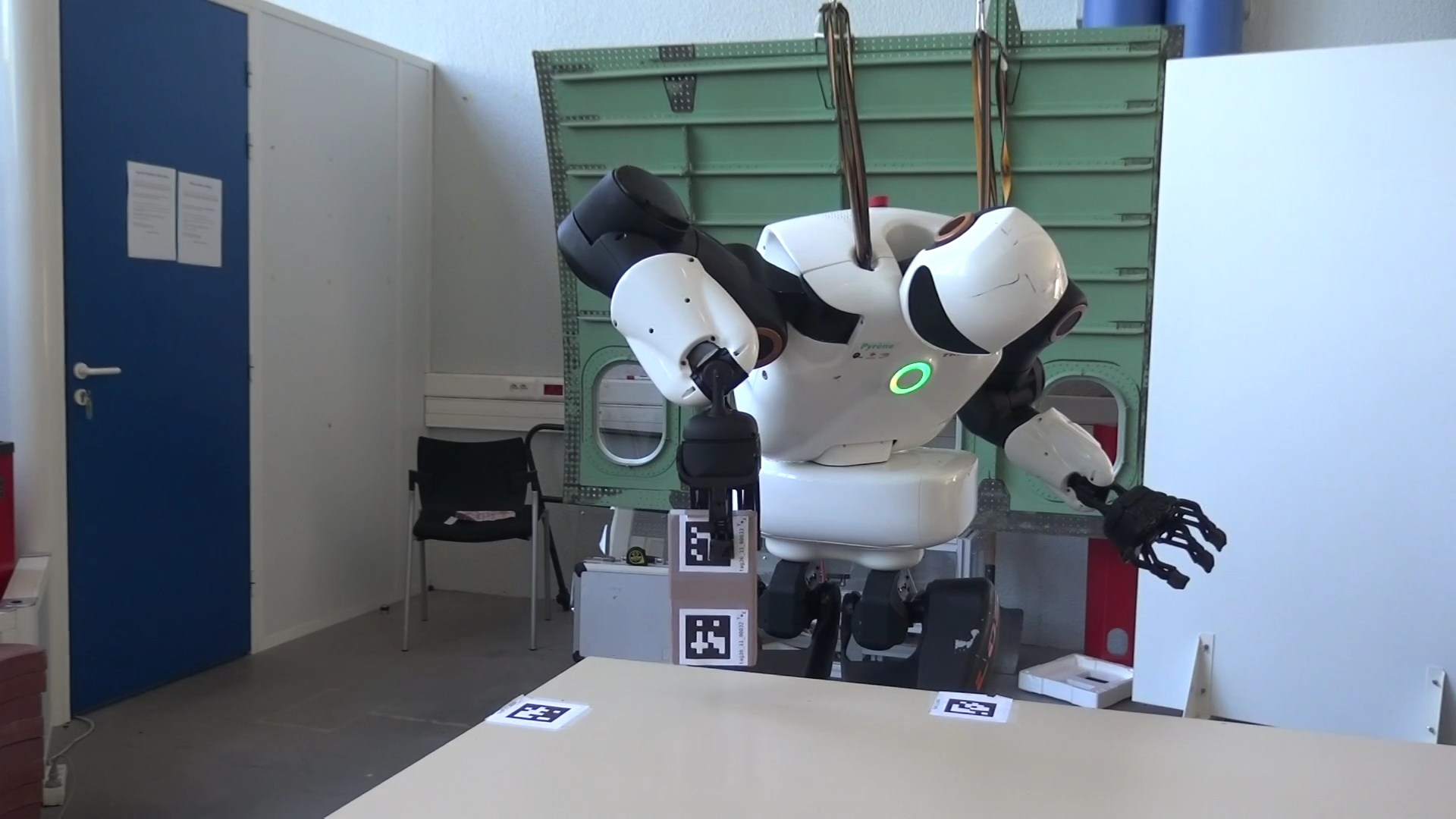
Pyrène plans collision free and balanced motions to swap a box upside-down on a table. The motion is planning using HPP software platform, and executed by the Stack of Tasks. Only the initial, goal poses of the object, and the possible grasps are provided to the algorithm. The software needs to figure out the the robot needs to use both hands to swap the object.
Motion Planning for cleaning robot
Motion planning for an industrial cleaning robot. The input is a discretized map of the environment. The result is a trajectory that first follows each wall and then covers the inner surface of the room to clean.
Balancing and Reaching with Model Predictive Control
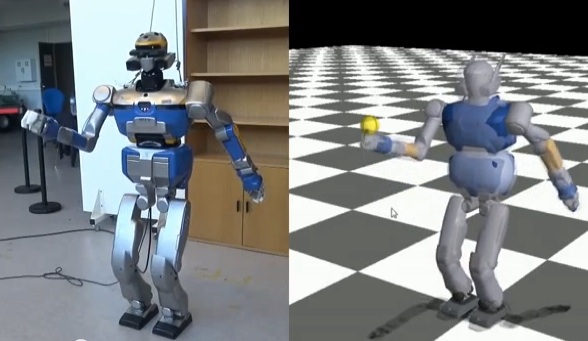
HRP-2 balances while trying to reach a moving target (i.e. a simulated yellow ball moved by the user through a 3D mouse). The motion is generated online through MuJoCo, a fast trajectory optimization software based on the optimal-control algorithm iLQR and a smooth approximation of the contact dynamics. The control objectives are specified with a cost function, which was designed to make the robot i) balance, ii) reach the ball, iii) not take a step and iv) minimize joint torques and velocities.
Chiken head tracking enables hand stabilization
The HRP-2 robot stabilizes its right hand position regarding perturbations, introduced by Jean-Paul, that excitate the flexibility of the ankles, using IMU sensors and Kalman filtering techniques. As we put a stuffed chicken in HRP-2 stabilized hand, we have the illusion that the stabilization is achieved by tracking the bird's head.
HRP-2 walks through a hole inside a wall
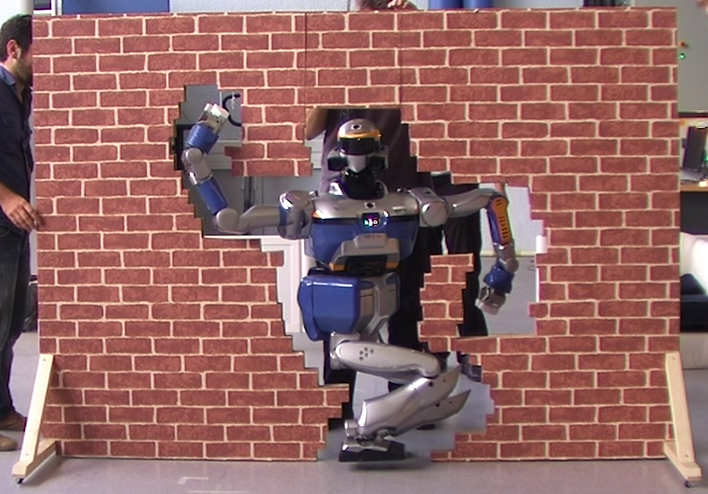
Application of our whole-body motion planner: HRP-2 walks through a constrained hole in a brick wall. This motion illustrates both the capabilities of humanoid robots and the power of motion planning methods that are developped.
Dance with HRP2

Demonstration of the performances of the new inverse-dynamics solver. The final motion was scenarized by the dancer Tayeb Benamara, dancing with the robot a teacher/student relationship, led by the rhythms of the DJ EnjeB. The dance was performed three times on the night of October, the 15th, 2011, in front of 1000 persons.
Small-Space Controllability
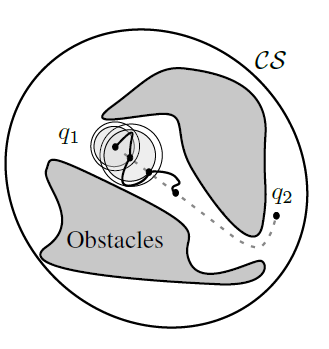
The walking trajectory is planned in two steps. A first draft path is computed using random motion planning techniques that ensure collision avoidance. In a second step, the draft path is approximated by a whole-body dynamically stable walk trajectory. The mall-space
controllability property ensures that the first draft path can always be
approximated by a collision-free dynamically stable trajectory.
Moving across a door (documented objects)
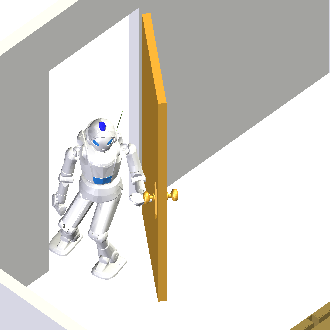
Documented objects are a mean to plan sequences of tasks with a sampling-based path planner, by specifying the affordance of some important objects of the environment. It was used for example to move across a door in various contexts.
See also...
All the videos of the team are collected in a youtube channel. See the easy acces below, or move to the channel page of the Youtube website to subscribe and comment.
|
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}