PhD Theses
Hierarchical quadratic programming

We now open a project to use theoretical properties based Example of targeted dynamic whole-body on the robot behavior model and on the solver layout to movements improve its behavior and performances. We want to deliberately degrade the algorithm (e.g. in terms of accuracy) while keeping a precise list of the resulting theoretical properties. In particular, to ensure a safe robot behavior, it is important to find a way to automatically regularize the problem when it is ill-conditioned (i.e. accept the return solution to be suboptimal in exchange to its “safety”).
Details in a pdf file.
Anthropomove : analyse et génération de mouvements corps-complet des systèmes anthropomorphes
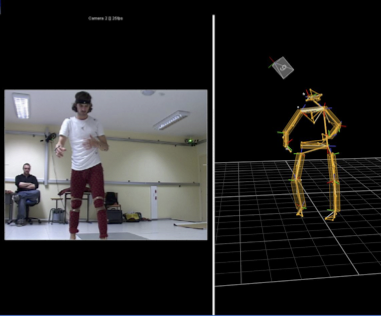
L’objectif de cette thèse est double. Il s’agit d’une part de contribuer à identifier les principes organisationnels du mouvement humain en comparant des mouvements observés avec des mouvements automatiquement générés sur la base de hiérarchies de tâches et de contraintes implémentées dans le logiciel de la « pile de tâche ». D’autre part, il s’agit de s’inspirer de l’analyse du mouvement humain pour paramétrer efficacement les logiciels de génération de mouvement des robots humanoïdes dans le but de générer des mouvements plus robustes et naturellement plus proches du mouvement humain.
Details in a pdf file, in french.
Real-time embedded motion generation
The thesis will focus on the development of a methodology to apply the dynamic motion generator in real-time, close-loop, onboard the robot. The candidate will account of all the aspects of real-time computation, numerical stability and safety of the algorithm and sensor acquisition, filtering and feed back. The main challenge is to establish which sensors to use to regulate what part of the motion. Typical sensors are the end-effector force sensors, IMU, cameras. Each sensor gives various information types that enables to observe only parts of the motion, and requires to be appropriately combined to obtain determinist observations. Moreover, the parameters of the sensors (both intrinsic and extrinsic) are unknown, and requires to be calibrated using learning techniques. Experimental setup will comprehend the HRP2 robot, the Romeo robot (from Aldebaran, expected in early 2012) and the infrared-camera-based motion-capture system. Depending on the wishes and skills of the candidate, the thesis can drift toward numerical analysis, filtering, control, or learning.
Details in a pdf file, in french.
Motion planning of digital actors
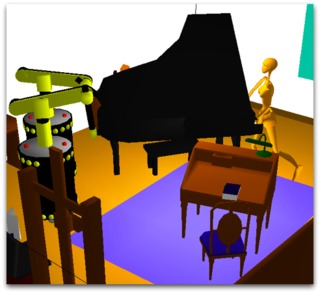
Details in a pdf file, in french.
Haptic feedback steering of digital mannequins for virtual prototyping

Details in a pdf file, in french.
Shared control between an automatic planner and a human operator in virtual reality for motion planning with contacts
Details in a pdf file, in english.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}