Dance with HRP-2
with Oscar Ramos, Olivier Stasse, Sovannara Hak and Mitsuharu Morisawa
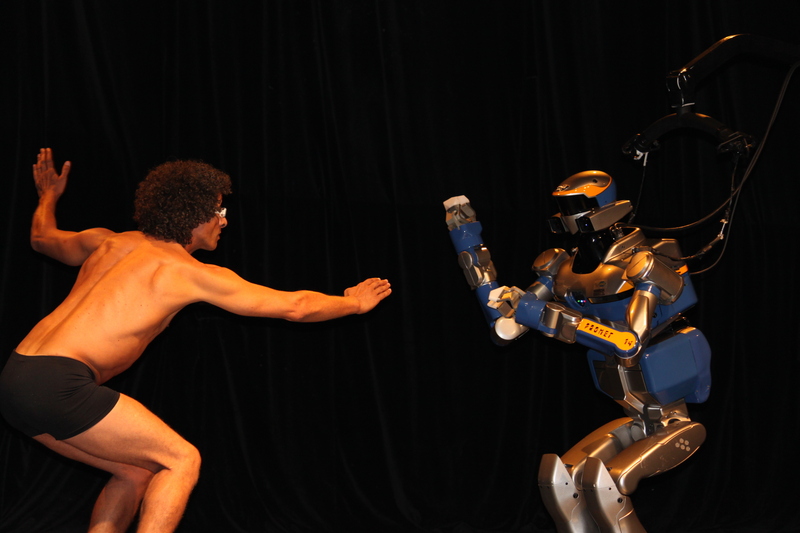



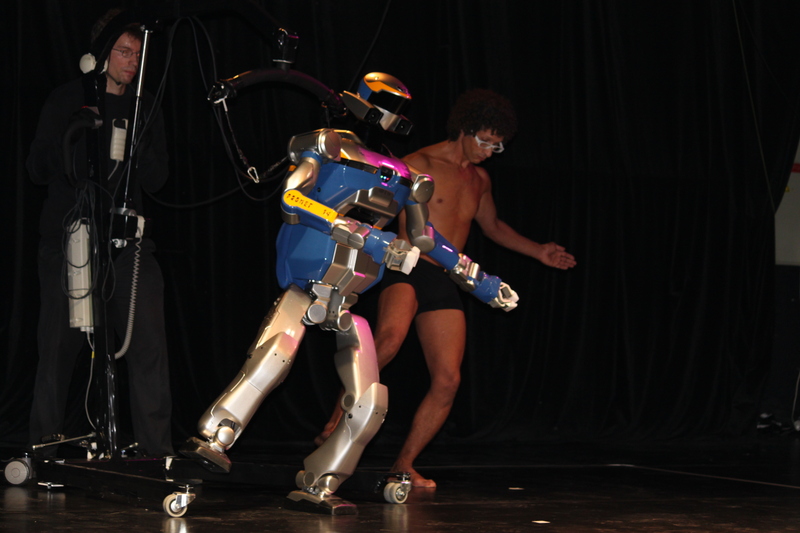
Event of dispersion by Art. The choreography was proposed by the dancer Tayeb Benamara. The motions where recoreded by the motion capture, then adapted to the robot-HRP2 dynamic, accounting for balance and motor capabilities. The motion is computed has the optimal solution using the distance to the captured motion as a cost function, and the robot dynamics consistency as a top-priority constraint. The transfert from the 20 minutes of motion capture to the robot needed around 1h of computation time, and around 1 month of development for the team, based on the preliminary developments of dynamics retargeting from motion capture to virtual avatar.
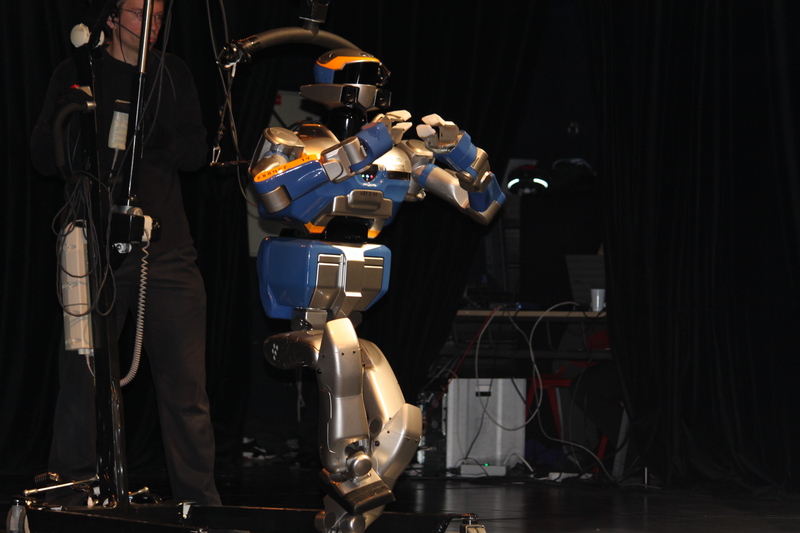
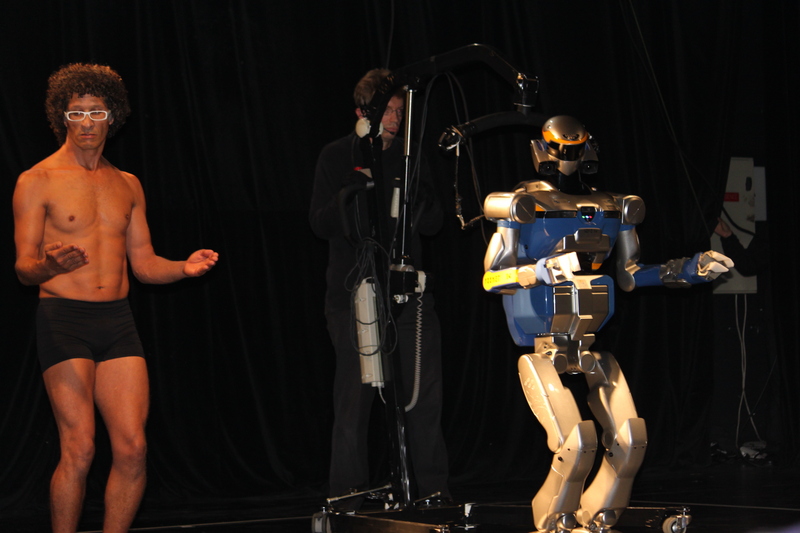
The final motion was then scenarized by the dancer Tayeb Benamara, dancing with the robot a teacher/student relashionship, led by the rythms of the DJ EnjeB. The dance was performed three times on the night of October, the 15th, 2011, in front of 1000 persons. The next year, we did the demonstration again in front of 1500 persons without any secure device. The robot could have fall down and broke itself as it was the case in the DRC challenge.
The demonstration was the oportunity to present to the public the know-how of the group for robotics balance, as well as the limits of the technology.
Our demonstration made the front page of the Robotics and Automation Magazine, Volume 22 Issue 4, Dec. 2015. You will be to find more details in the related paper given below.
---
Videos
You can find a first video here: Video for the demonstration at Salle du Cap. This video was done in collaboration with Département IUT Métiers du Multimédia et de l’Internet.
A second video gives a glimpse of the demonstration at the Halle aux grains.
The last video from YouTube is here (the second part of the video is a artistic event in Toulouse center town, with a beautifull robotic costume, no scientifical link with HRP2 demo).
Reference Publications
- Dynamic Whole Body Motion Generation for the Dance of a Humanoid Robot. O. Ramos, N. Mansard, O. Stasse, S. Hak and L. Saab. IEEE Robotics & Automation Magazine, January 2015. (accepted).
")
")
- Dynamic Whole-Body Motion Generation Under Rigid Contacts and Other Unilateral Constraints. L. Saab, O. Ramos, N. Mansard, P. Souères and J-Y. Fourquet. IEEE Transaction on Robotics, 29(2):346-362, April 2013.
- Generation of dynamic motion for anthropomorphic system under prioritized equality and inequality constraints. L. Saab, N. Mansard, F. Keith, J-Y. Fourquet and P. Souères. In IEEE Int. Conf. on Robotics and Automation (ICRA'11), Shangai, China, May 2011.
- Generic Dynamic Motion Generation with Multiple Unilateral Constraints. L. Saab, O. Ramos, N. Mansard, J-Y. Fourquet and P. Souères. In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS'11), pages 4127-4133, San Fransisco, USA. IEEE, September 2011.
- Dynamic Motion Capture and Edition using a Stack of Tasks. O. Ramos, L. Saab, S. Hak and N. Mansard. In IEEE-RAS International Conference on Humanoid Robots (Humanoid'11), pages p. 224-230, Bled, Slovenia. IEEE, October 2011.
See also
- Capture, recognition and imitation of anthropomorphic motion. S. Hak, N. Mansard, O. Ramos, L. Saab and O Stasse. In IEEE Int. Conf. on Robotics and Automation (ICRA'12), pages pp. 3539-3540, St Paul, USA, May 2012. (video session).
- A Dedicated Solver for Fast Operational-Space Inverse Dynamics. Nicolas Mansard. In {2012 IEEE International Conference on Robotics and Automation}, pages 4943-4949, St Paul, United States. IEEE, May 2012.
- A Dedicated Quadradic Program for Fast Hierarchical-Inverse-Kinematic Resolution. A. Escande, N. Mansard and P-B. Wieber. In IEEE Int. Conf. on Robotics and Automation (ICRA'10), Anchorage, USA, May 2010.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}