Navigation for nonholonomic mobile robots
Goal
The goal of this research topic is to develop algorithms that will make articulated and kinematically constrained vehicles like trailer-truck systems navigate autonomously in partially known environments. The main challenge is to execute motions that can be very close to the obstacles of the environment. Our research work focus on two aspects of the problem.
- Motion planning in cluttered environments,
- Motion control in dynamic environments.
Mobile Robot Hilare 2 towing a trailer | 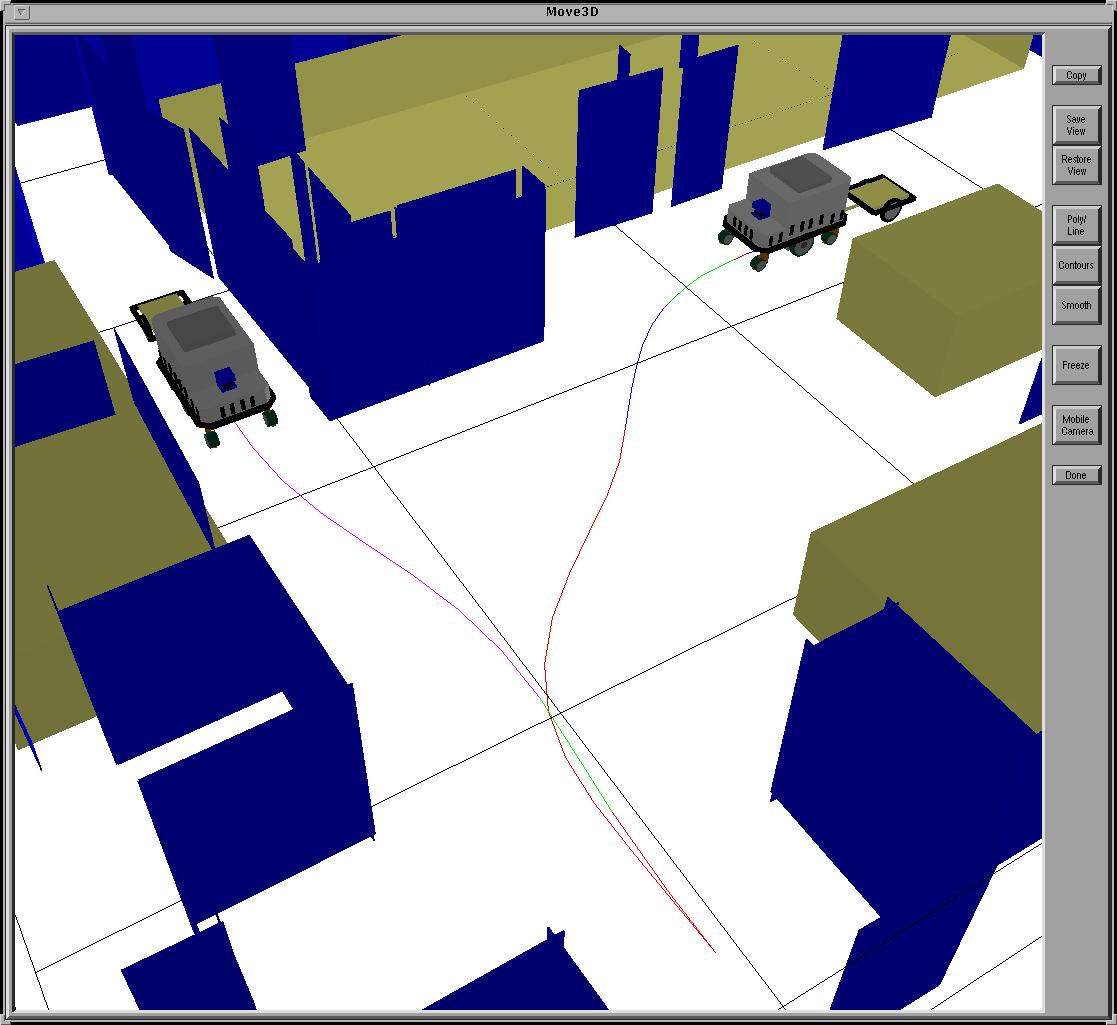
A path computed by Move3D |
Research Domains
Motion Planning
Although the problem statement is very simple, the resolution requires very complex methods. Computing automatically a path between two configurations for a robot given an exact description of the environment is known to be of a huge computational complexity. No algorithm is today able to solve this problem exactly. Adding kinematic constraints induced by the wheels of the robot makes the problem even more complex. Past research work at LAAS-CNRS have led to the development of a generic motion planning platform called Move3D . We use this platform to compute paths for our mobile robot Hilare towing a trailer.
- Motion Execution and Reactivity
- Motion execution has to deal with three main difficulties:
- inaccuracy of the map of the environment,
- localization errors,
- unexpected obstacles that are not in the map.
These perturbations result in the same side effect: the path computed by the path planner may be in collision. To make the robot react to these real world constraints, we need to adapt dynamically the trajectory using on board sensors. In this purpose, we have developed a generic approach of trajectory deformation. This method iteratively adapts the current trajectory in order to make it move away from obstacles, keeping the kinematic constraints of the system satisfied.

Path computed by Move3D dor Hilare towing a trailer. Red dots are obstacles detected by a Sick laser range finder. | 
The path after deformation is collision free and satisfies the kinematic constraints of the robot. |
Related Projects
Grand Itinéraire
Our work has been applied in a project gathering LAAS-CNRS, Airbus Transportation, the French ministry of transportation and Kineo CAM. The problem was to validate the itinerary of convoys carrying the components of the future Airbus A380. The components are built in different cities in Europe and need to be carried from there to Toulouse where they are assembled. The last part of the transportation is performed by road and the convoys need to cross constrained passages in two villages (Gimont and Levignac). The size of the convoys (more than 12 meter high, 8 meter wide and 50 meter long) requires validation of the itinerary and optimization of the distance of the trajectories to obstacles. Within this project, we have adapted our path deformation methods for nonholonomic systems in order to adapt it to trailer-truck kinematics.

Optimized trajectory across Gimont village. |
Gallery
 |
Hilare-trailer avoiding an unexpected obstacle (Animation MPEG 386 Ko) |
 |
Execution of the path after deformation (Movie MPEG 8933 Kb) |
|
|
Obstacle avoidance going backward (Movie MPEG 7153 Kb) |
 |
Hilare-trailer avoiding a box (Animation Quicktime 3089 Kb) |
|
|
Hilare-trailer avoiding a box backward (Animation Quicktime 5452 Kb) |
 |
Navigation in tight environment with poor localization (Animation MPEG 510 Kb) |
 |
Navigation in tight environment (Movie Quicktime 20971 Kb) |
 |
Navigation in crowd (Movie Quicktime 28664 Kb) |
 |
Navigation in crowd (Movie Quicktime 42029 Kb) |
 |
Docking (Movie MPEG4 5324 Kb) |
 |
Parallel Parking (Movie Quicktime 9073 Kb) |
 |
Parallel Parking with perturbation (Movie Quicktime 27174 Kb) |
 |
Convoy carrying a wing across Lévignac (Movie AVI 69969 Kb) |
|
|
Convoy carrying a wing across Lévignac (Movie AVI 58329 Kb) |
|
|
Convoy carrying a wing across Lévignac (Movie AVI 29214 Kb) |
|
|
Convoy carrying a wing across Gimont (Movie AVI 89638 Kb) |
|
|
Convoy carrying a wing across Gimont (Movie AVI 55285 Kb) |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}