Florent Lamiraux
|
Email: Florent.Lamiraux@laas.fr |
 |
Short Résumé
| Oct. 2009 | Directeur de Recherche CNRS-LAAS, Toulouse, France
Humanoid Robots (motion planning and control) |
| Dec. 2007 - Sept. 2009 | Chargé de Recherche CNRS/AIST Joint Robotics Laboratory, Tsukuba, Japan
Humanoid Robots (motion planning and control) |
| Sept. 1999 - Dec. 2007 | Chargé de Recherche CNRS-LAAS, Toulouse, France
Humanoid Robots (motion planning and control) Motion Planning and Control for Nonholonomic Robots |
| Oct. 97 - Sept. 99 | Postdoctoral Research Associate at Rice University.
Path Planning for Deformable Objects |
| Sept. 94 - Sept. 97 | Ph-D in the Robotics and Artificial Intelligence group at LAAS-CNRS,
Toulouse, France. Motion Planning and Control for a Mobile Robot with Trailer |
| 1993-94 | Advanced Studies Degree (DEA) in Computer Science at ENSEEIHT
in Toulouse. |
| 1991-93 | Ecole Polytechnique Paris. |
Publications
All the publications are avaiblable here (with pdf files if available).
Research Areas and Interests
Manipulation planning
When an robot manipulates objects, the motions of the objects are subject to constraints:
- objects grasped by the robot move with the robot,
- objects not grasped by the robot stay static in a stable position.
These constraints raises scientific issues that we try to address by designing dedicated algorithms.
Robot programming
Programming industrial robots to perform repetitive tasks is time-consuming. Based on our knowledge in manipulation planning, we have developed
- software that handle the manipulation constraints evoked above, and
- a graphical user interface that enable a programmer to define the manipulation constraints relative to a problem.
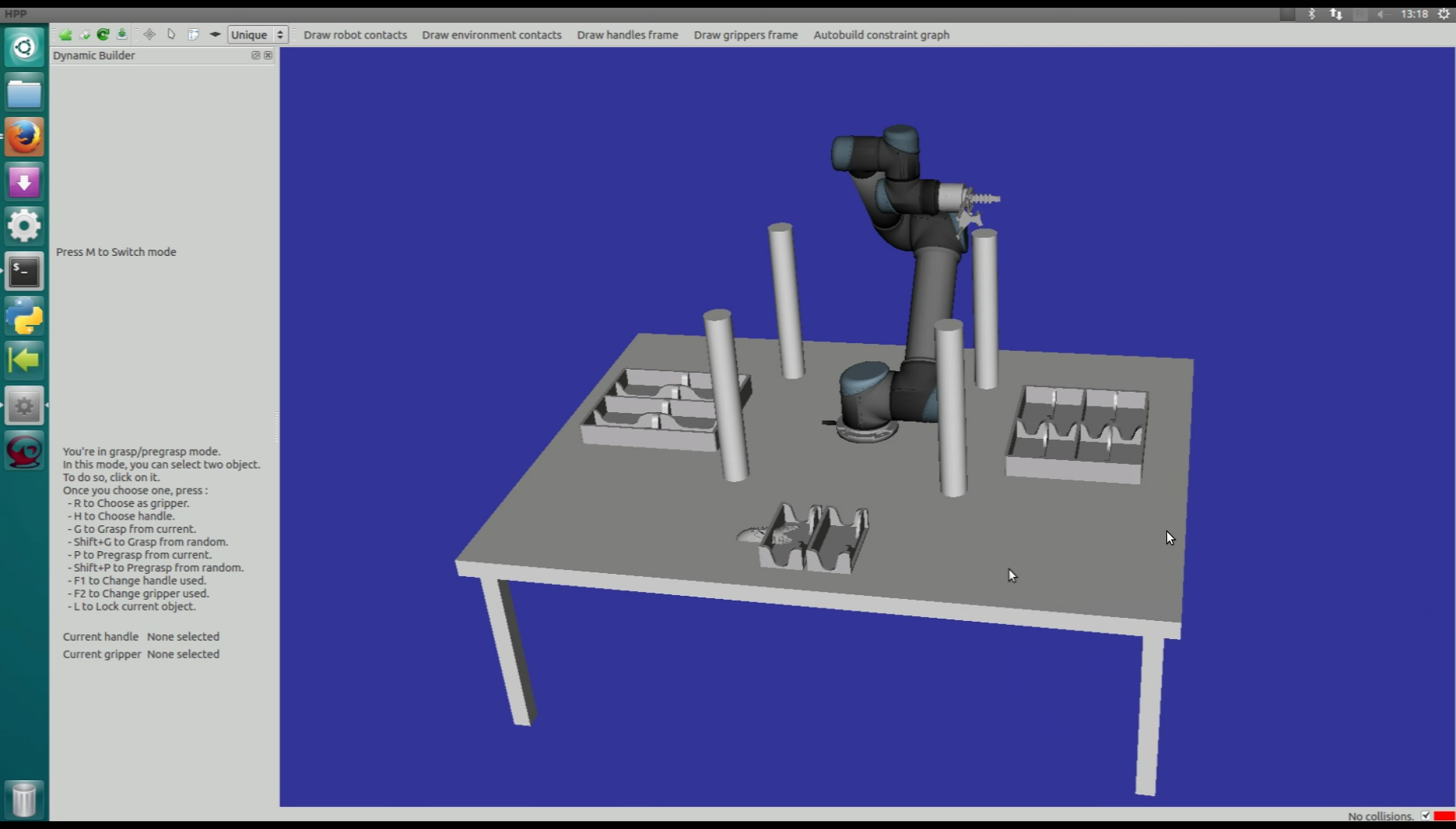
| 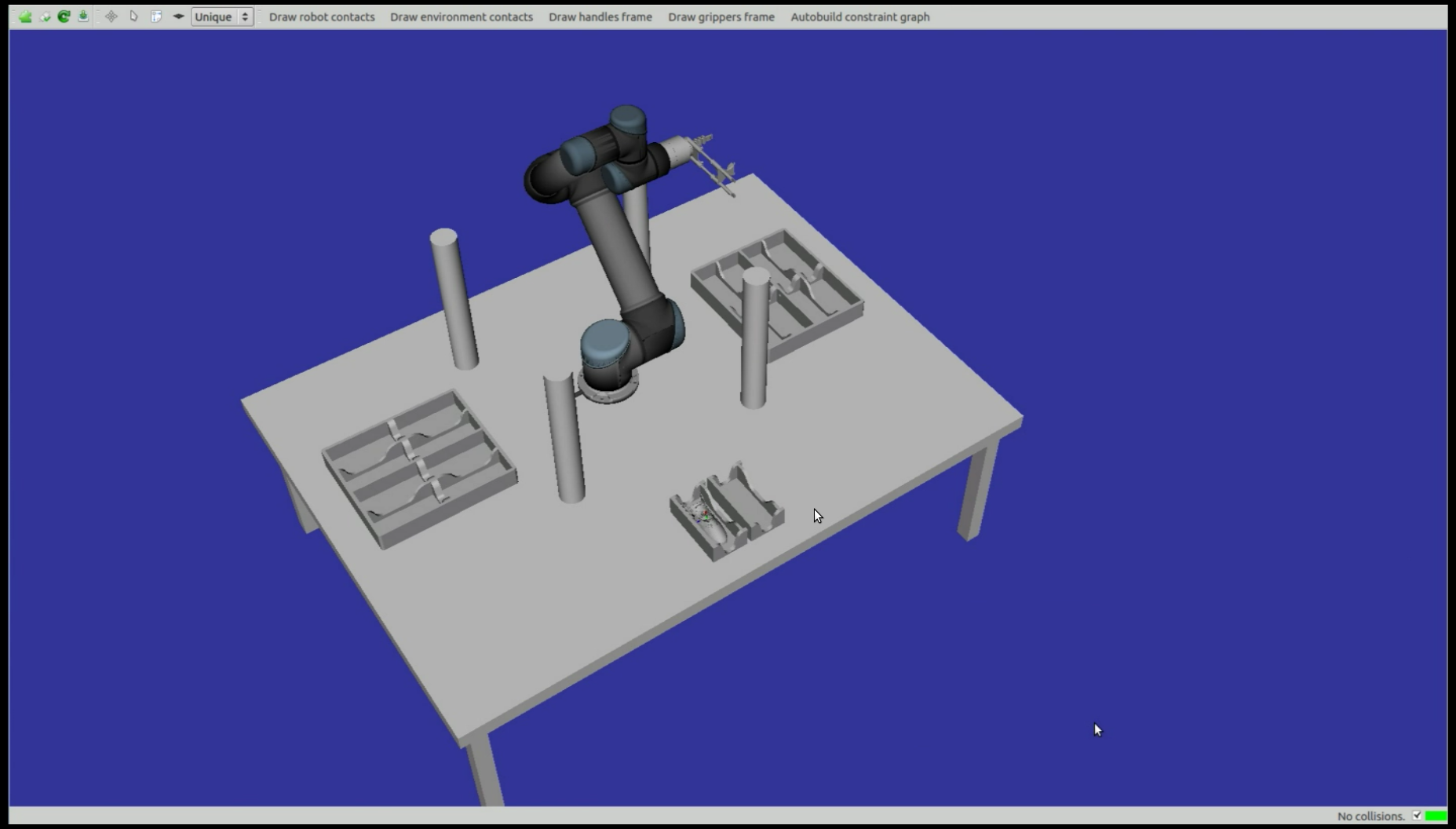
| 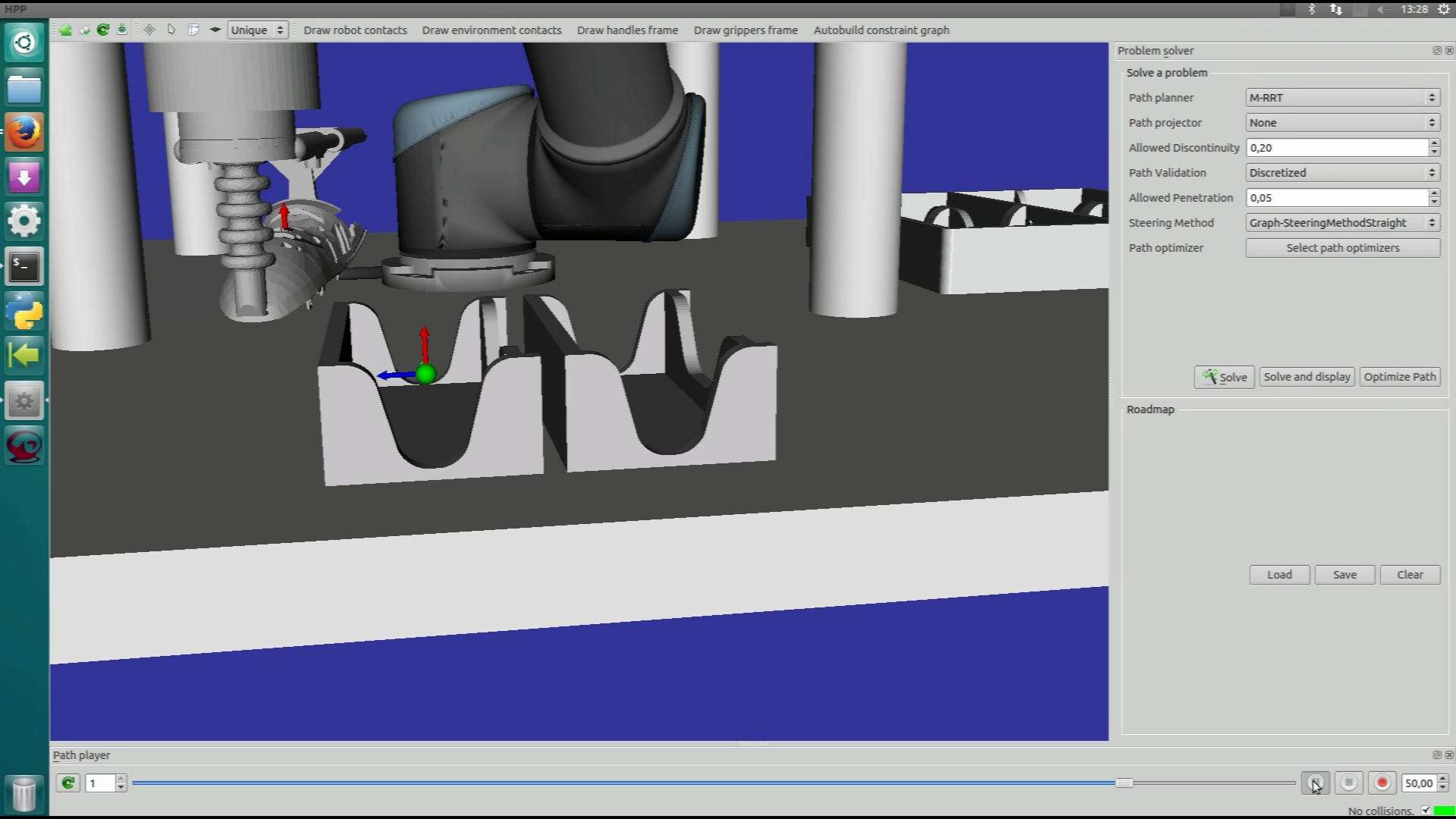
| 
|
| Definition of a manipulation problem. | Definition of grasps and resolution. | Pre-grasp position to ease motion planning | The full sequence. The robot grasp each of 8 parts, move them to the caroussel where they are processed, put them back to the initially empty tray, and finally stacks the empty tray on top of the full tray. |
Humanoid Robot Motion Planning
The goal of this research topic is to make humanoid robots able to perform every-day tasks in environments designed for human beings. Our research work focus on geometric motion planning, taking into account kinematic and dynamic constraints.
- Motion Planning
We conduct research aiming at making a humanoid robot able to perform a large range of motions in order to achieve various tasks in in-door environments, for instance,
- walking in a cluttered environment,
- grasping an object,
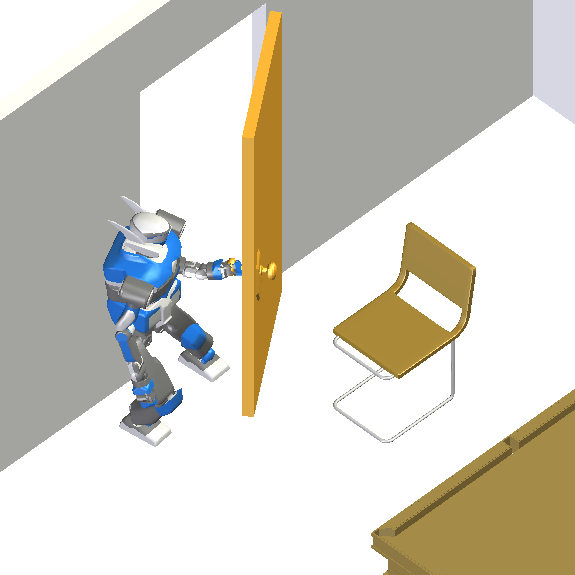
- going through a door,
- opening or closing a window...
Our approach consists in augmenting object models with the information useful to manipulate these object. See [Dalibard et al 2010] for details.
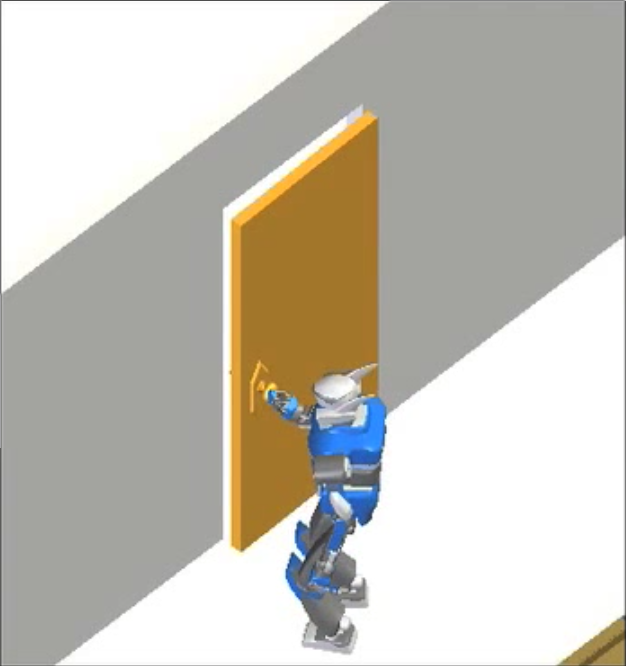
| 
| 
| 
|
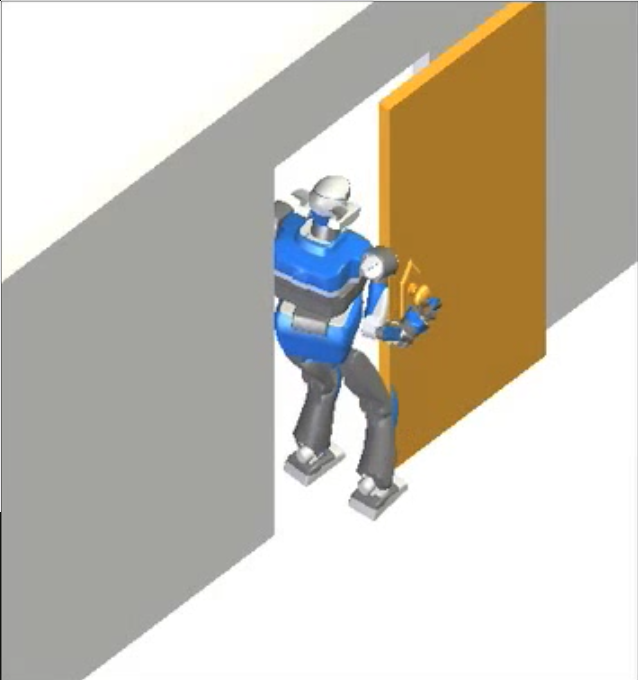
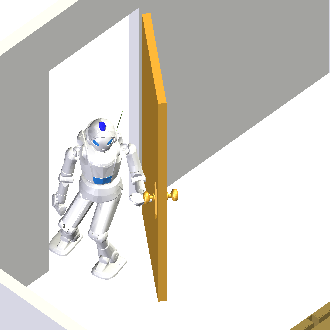
| HRP-2 waking through a door... | ...cluttered by an obstacle... | ...through a sliding door | Toyota Partner walking through a door |
- Whole-Body motion planning
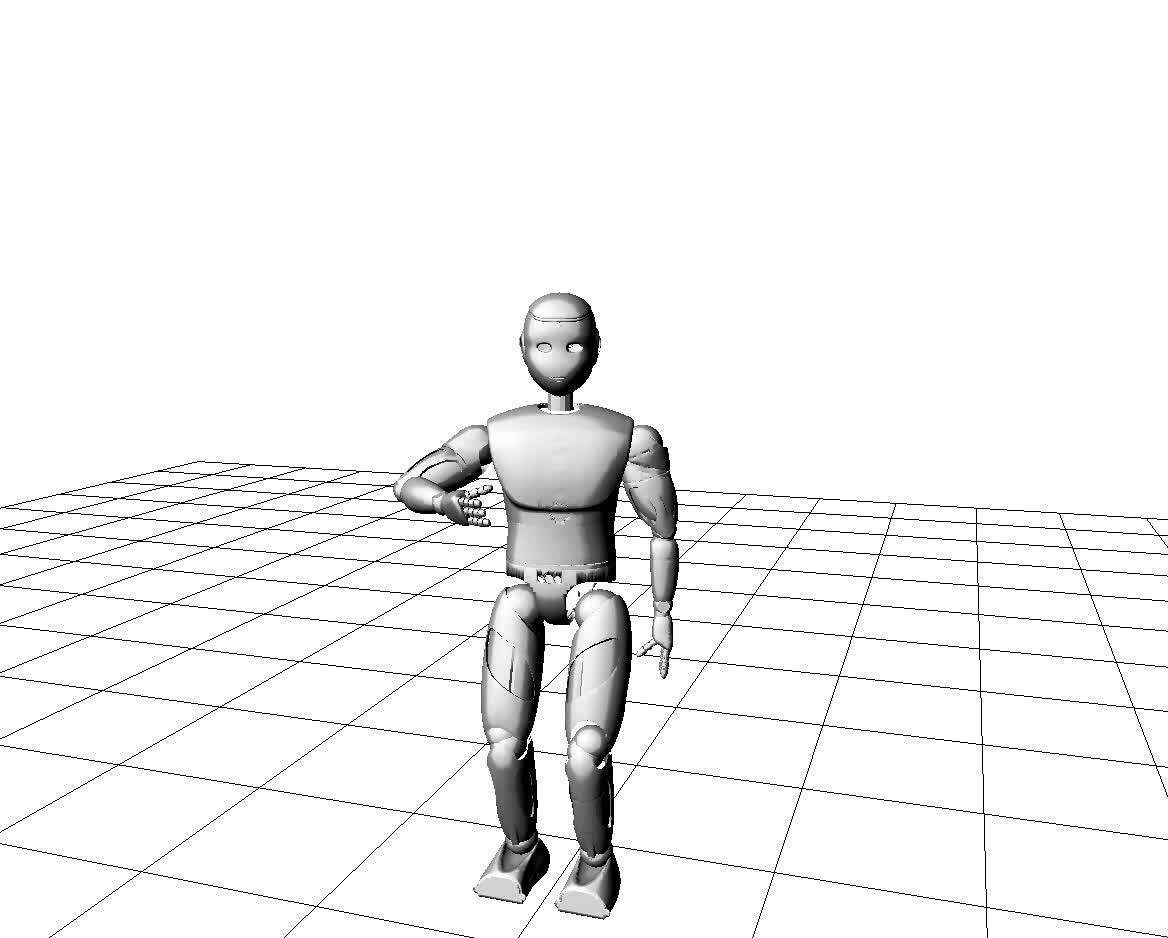
hpp-gik is a software SDK that implements task-based inverse kinematics. The sofware is released under license LGPL and can be found on github. To use this SDK, it is recommended to download the tutorial The movie below shows a simple motion produced by hpp-gik including whole-body stepping and upper-body tasks.
Navigation for nonholonomic mobile robots
The goal of this research topic is to develop algorithms that will make articulated and kinematically constrained vehicles like trailer-truck systems navigate autonomously in partially known environments. The main challenge is to execute motions that can be very close to the obstacles of the environment. Our research work focus on two aspects of the problem.
- Motion planning in cluttered environments,
- Motion control in dynamic environments.
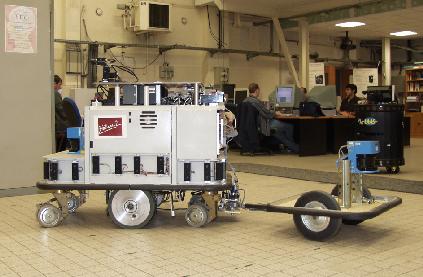
Mobile Robot Hilare 2 towing a trailer | 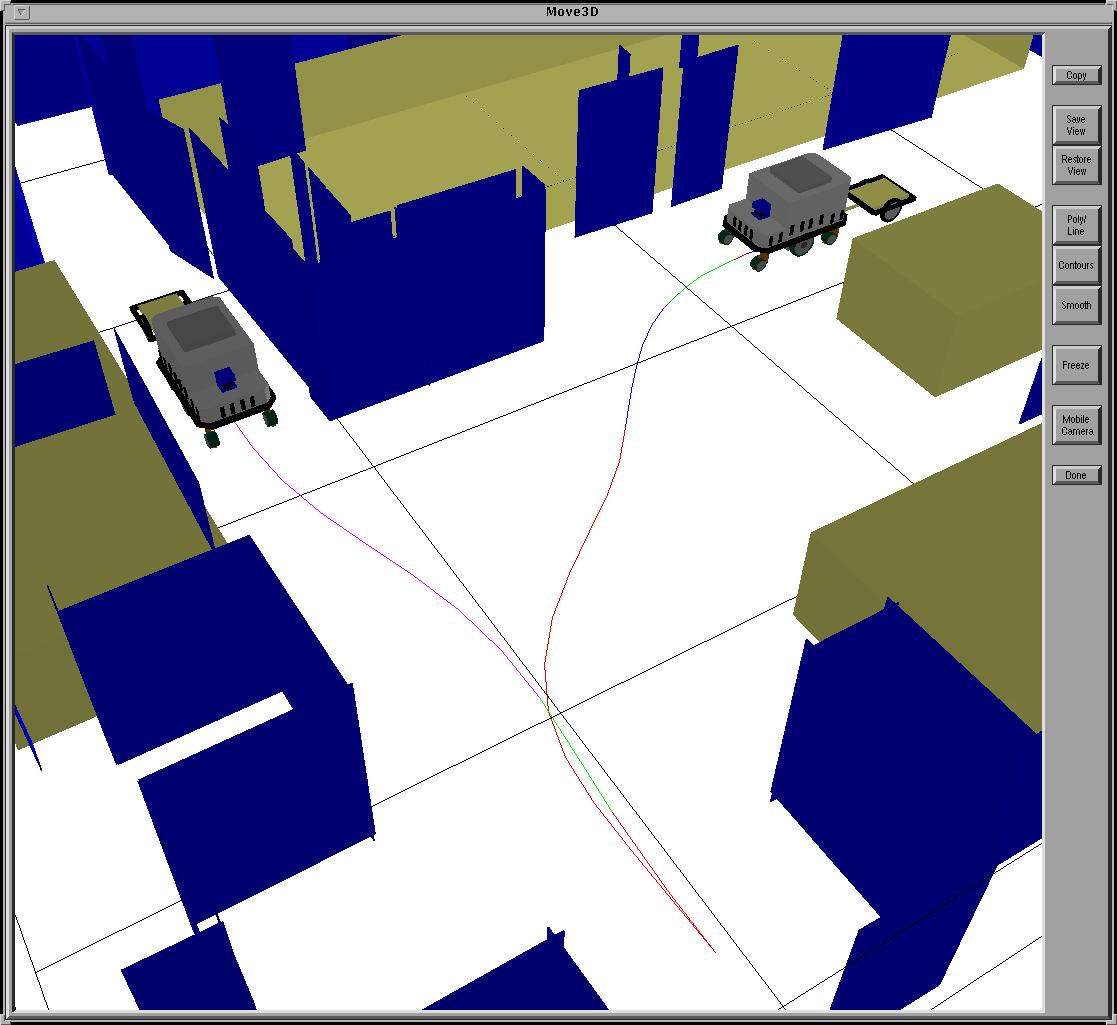
A path computed by Move3D |
Talks and Lectures
Talks
- Motion planning for every-day tasks in human environments, JST/CNRS Workshop, Tsukuba, Japan, 1 October 2010.
- Prioritizing linear equality and inequality systems: application to local motion planning for redundant robots, IEEE International Conference on Robotics and Automation, Kobe, Japan, 12-16 May 2009.
- Trajectory following, localization and obstacle avoidance for multi-body wheeled mobile robots,
- Workshop on Autonomous sensor-based motion for complex robots in complex environments, ICRA May 15, 2006.
- Déformation réactive de trajectoires, LAAS-CNRS, Toulouse, January 2002.
- Reactive Trajectory Deformation for Nonholonomic Systems: Application to Mobile Robots, IEEE International Conference on Robotics and Automation, Washington DC, 11-15 May 2002.
- Path Optimization for Nonholonomic Systems: Application to Reactive Obstacle Avoidance and Path Planning, Workshop on Control Problems in Robotics and Automation, Las Vegas, 14 December 2002.
- Reactive obstacle avoidance and trajectory optimization for nonholonomic systems: two problems, one solution, International Symposium on Robotics and Automation, Sevilla, 29 June 2004.
Lectures
- Motion Planning (1) Class in English at Institut de l'aéronautique et de l'espace, Toulouse, September 2019.
- Manipulation motion planning (2) Class in English at Institut de l'aéronautique et de l'espace, Toulouse, September 2019.
- The stack of tasks A framework for real-time motion generation for redundant robots, May 23. 2013.
- Motion planning, Summer School on Image and Robotics, July 4. 2011, Grenoble, France.
- A short introduction to Python, A 4 hour lecture to introduce python basics.
- Algorithmique du mouvement pour les systèmes non holonomes, Lecture notes on controllability and motion planning for nonholonomic systems (in French, draft version).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}