Mylene Campana
|
Email: mcampana@laas.fr |
 |
Mylène was a PhD candidate from September 2014 to August 2017 under the supervision of Jean-Paul Laumond.
Her thesis was defended on the 7th of July 2017.
Her project was funded by a French national grant provided by the ENS Rennes.
Github homepage
Linkedin
ResearchGate
Short Bio
Graduated in Mechatronics at ENS Rennes 2010-2013.
Research Master "Artificial Intelligence, Pattern Recognition and Robotics" at the University Paul Sabatier (Toulouse) 2013-2014.
Internship in the Gepetto team on motion planning 2014.
Research Interests
My PhD thesis is about "Motion Planning for Digital Actors". I focus on designing and implementing new algorithms in the motion planner software of the team HPP (Humanoid Path Planner).
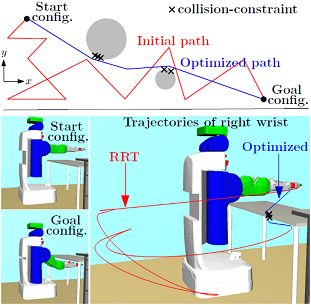
For instance, we designed a gradient-based path-optimizer that shortens solution-paths obtained by probabilistic planners. It has been tested in simulation with several robots in various environments.
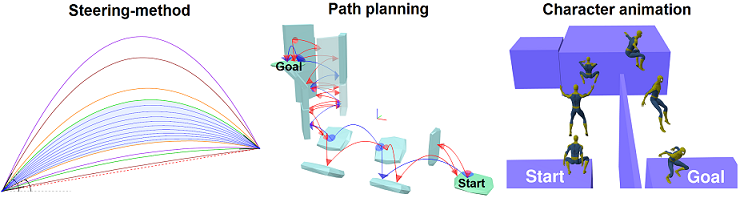
We are also interested in planning dynamic motions for artifacts. To do so, we first plan the ballistic path of a point in 3D environments containing slipping surfaces. We then use a contact generator developed by Steve Tonneau and an interpolator-planner to process the animation of the fullbody character.
Teaching
I also give practical classes at the Université Paul Sabatier - Toulouse III (France), at Bachelor and Master levels (L3-M1-M2). These exercises are about robotics command with ROS, simulation and automation with Matlab and basic C programming.
Papers
- Motion planning for digital actors. Mylène Campana. PhD thesis, Université Paul Sabatier (Toulouse 3), July 2017.
")
")
- HPP: a new software for constrained motion planning. Joseph Mirabel, Steve Tonneau, Pierre Fernbach, Anna-Kaarina Seppälä, Mylène Campana, Nicolas Mansard and Florent Lamiraux. In International Conference on Intelligent Robots and Systems (IROS 2016), Daejeon, South Korea, October 2016.
- Ballistic motion planning for jumping superheroes. M. Campana, P. Fernbach, S. Tonneau, M. Taïx and J. P. Laumond. In Motion in Games Conference (MIG), pages 133-138, Burlingame, CA, USA, October 2016.
- Ballistic motion planning. M. Campana and J. P. Laumond. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1410-1416, Daejeon, South Korea, October 2016. (Finalist of the Best Paper Award on Safety Security and Rescue in Robotics).
- Ballistic motion planning for jumping superheroes. Mylène Campana, Pierre Fernbach, Steve Tonneau, Michel Taïx and Jean-Paul Laumond. In Motion in Games Conference, Burlingame, CA, United States, October 2016.
- A gradient-based path optimization method for motion planning. M. Campana, F. Lamiraux and J. P. Laumond. Advanced Robotics, 30(17-18):1126-1144, 2016.
- A simple path optimization method for motion planning. M. Campana, F. Lamiraux and J. P. Laumond, 2015. (technical report).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}